


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 50 51 52 53 54 55 56 57 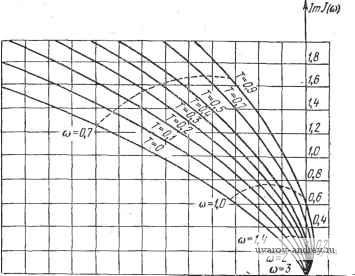 -U-tt -и -2.0 -1,8 -1,6 -1,4 -Ц -iO -0,8 -0,6-D,i-0,2 О Яе1(а) 0,12 0,10 0,08 0,06 0,04 0,02 О ImJ(o)
Рис. П.12. Годограф релеЛной сисгемы (1Г (р)= рМр+1) (Гр+1) [mj(a) -9 -8 -7 -6 -5 -4- -5 -Z -1
-1,8 -1,6 -1,U -1,1 -1,0 -0,8 -0,6 -0,4 -0,1
Рнс. П.13. Годограф релейной сцстемы IF {р)= Релейные автоматические системы с зоной нечувствительности 1т If (о) ImJy(o) ОЛ 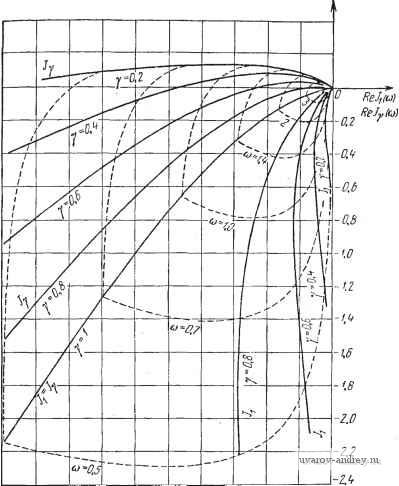 -2,0 -1,8 -1,6 -1,4 -1,2 -1,0 -0.8 -0,6 -0,4 -0,2 О Рис. П,14. Голографы релейной сисгемы с зоной нечувсгвигельности W (р) = р (Р + 1)
1т1у{1л) О ReJffa] ~0,Ч -0,6 . -0,8 -1,6 -1,8 -2,0 -2,2 -г,ч 2,0 -1,8 -1.6 -l, -1,2 -1,0 -0,8 -0,6 -0,4 -0,2 О Рис. П.15. Годографы релейной системы с зоной нечувствительности, р(р+1)(0.1 р+1) lmJ,(ai) ImJy(ai) ReJ,(u) 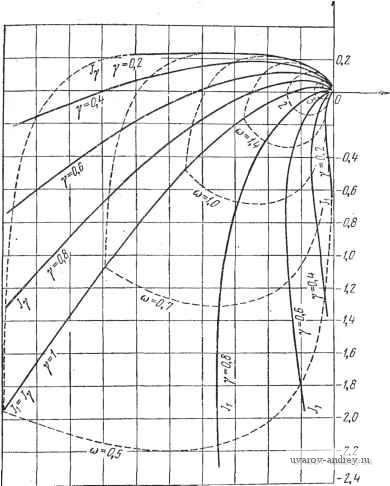 -2,0 -1,8 -1,6 -1,4 -1,2 -1,0 -0,8 -0,6 -0,4 -0,2 0 Рис. П.16. Годографы релейной сисгемы с зоной нечувствительности, Р(Р+1)(0,2р+1)- 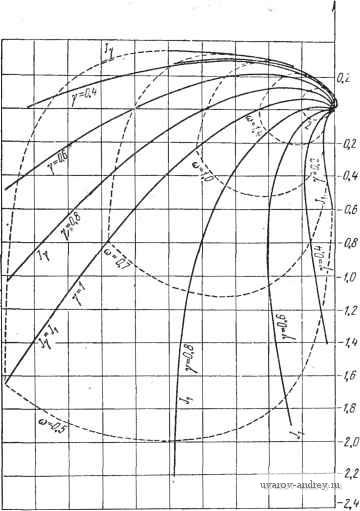 0 ReJ,(a) -Zfi 4,8 -f,6 -1,4 -1.2 -1,0 -0,8 -0,6 -0,4 -0,2 0 Рис. п. 17. Годографы релеЯной системы с зоной нечувствительности. ОБЗОР РАБОТ ПО ТЕОРИИ РЕЛЕЙНЫХ АВТОМАТИЧЕСКИХ СИСТЕМ Начальный этап развития теории релейных автоматических систем относится ко времени становления теории автоматического управления. Первым теоретическим исследованием регулятора релейного типа была работа одного из создателей классической теории автоматического регулирования И. А. Вышнеградского [1] (1878 г.) О регуляторах непрямого действия . Более простые задачи, связанные с регуляторами релейного типа, были рассмотрены в работах Леоте [1] (1885 г.), [2] (1891 г.). Интересно отметить, что в этих работах, по существу, исследована фазовая плоскость рассматриваемых систем и определены интегральные кривые и предельные циклы, хотя такой терминологией Леоте не пользовался. По замечанию А А. Андронова [1], Леоте, по-видимому, не был знаком с опубликованной несколько ранее работой Пуанкаре, в которой введены в математику предельные циклы. Наглядные и простые построения Леоте на фазовой плоскости применялись к исследованию некоторых релейных систем регулирования в работе Гуковского [1] (1896 г.). Системы непрямого регулирования с сервомотором постоянной скорости исследовались в работах Прелля fl] (1884 г.) и Пфарра [1] (1889 г.). В отличие от Леоте, исследования этих авторов основаны на графоаналитическом методе построения процессов регулирования. Преллем было предложено изящное геометрическое построение процесса в простейщей системе регулирования с постоянной скоростью сервомотора, которое применяется и в современных работах (диаграмма Прелля). Результаты работ Леоте, Прелля и Пфарра изложены в книге Бауэрс-фельда [1] (1905 г.). Графоаналитическому методу Прелля и Пфарра большое внимание уделено в книге Толле [1] (1909 г.). Этот метод Толле применил для решения задачи при учете нечувствительности регулятора. Однако, принимая, что нечувствительность приводит к временному запаздыванию процесса смешения муфты регулятора относительно процесса изменения регулируемой величины, а не является следствием сухого трения, Толле, как показано А. А. Андроновым, Н. Н. Баутипым и Г. С. Гореликом [2] (1946 г.), пришел к неверному результату. Вибрационным регуляторам, появившимся в 900-х гг., посвящены работы Зайднера (1908 г.), Наталиса [1] (1908 г.), Швайгера [1] (1909 г.). В этих работах был описан принцип действия вибрационных регуляторов и дано простейшее объяснение процессов, протекающих в них. Наиболее полные результаты были получены Тома [1] (1914 г.). На существенную роль задержек для объяснения принципа работы вибрационных регуляторов и необходимость привлечения методов нелинейной теории колебаний указывал В. С. Кулебакин [1] (1932 г.). Весьма наглядное и простое исследование релейной системы автоматического управления курса корабля выполнено Г. Н. Никольским [1] (1934 г.). Он изучил возможные движения рассматриваемой системы при помощи своеобразной фазовой плоскости, координатами которой является угол отклонения от курса и угол поворота руля. Процессы в двухпозиционном регуляторе температуры были исследованы Ивановым [1] (1934 г.). Некоторые типы следящих систем с одной степенью свободы управляемых реле рассмотрел Хазен [1] (1934 г.). Исключительно важную роль для теории нелинейных систем и в частности, для теории релейных систем, сыграла вышедшая в 1937 г. книга А. А. Андронова и С. Э. Хайкина [1], значение которой для теории автоматического регулирования трудно переоценить. В этой книге в качестве одного из примеров рассмотрен ламповый генератор с z-образной характеристикой, который представляет собой своеобразную релейную систему. Для исследования автоколебательных свойств этого генератора был применен развитый в книге метод фазовой трактовки. Этот метод использован в подавляющем большинстве работ по нелинейным системам с одной степенью свободы и в том числе по релейным системам. На примере лампового генератора с z-образной характеристикой было показано, что в силу специфических свойств этого генератора (независимость формы выходной величины релейного элемента (лампы) от характера движений в системе) нелинейную функцию можно заменить некоторой функцией времени, представляющей собой внешнюю периодическую силу, действующую на линейную систему. Частота этой периодической с^лы определяется свойствами системы. Благодаря этому нелинейная задача была сведена к исследованию действия внешней периодической силы (которая может быть представлена в виде ряда Фурье) на линейную систему, т. е. к линейной задаче. Эта простая и плодотворная идея в той или иной форме лежит в основе современных работ по теории сложных релейных систем. Во втором издании этой книги восстановлено имя третьего соавтора, А. А. Витта. Эта книга А. А. Андронова, А. А. Витта, С. Э. Хайкина [1] (1959 г.) была переработана и дополнена Н. А. Железцовым. В нее включены новые результаты, полученные школой А. А. Андронова и, в частности, детальное исследование разнообразных систем с одной степенью свободы. Влияние сухого трения и временного запаздывания в простейших релейных системах на основе фазовых портретов было исследовано К. Ф. Теодор-чиком [1] (1938 г.). Результаты этих исследований приведены также в книге К. Ф. Теодорчика [2] (1953 г.). В работе Е. Г. Дудникова [1] (1939 г.) с помощью графоаналитического метода построения процессов (диаграммы Прелля) исследовались различные формы движения в простейших регуляторах с постоянной скоростью сервомотора. Н. Ф. Гонек [1] (1939 г.) рассмотрел работу некоторых двухпозиционных регуляторов. В работе Краутвига [1] (1941 г.) было исследовано влияние люфта и трения на устойчивость контактной следящей системы при помощи метода припасовывания. Этот же метод был применен Бильгарцем [1] (1941 г.), [2] (1942 г.) при исследовании периодического решения уравнений движения релейной системы с одной степенью свободы. Для определения устойчивости этих периодических решений им был использован фазовый портрет. Продолжая направление работ В. С. Кулебакина, К. С. Бобов [1, 2] (1940 г.) исследовал вибрационный регулятор напряжения. Дальнейшее развитие теории вибрационных регуляторов получила в работе В. С. Кулебакина 2] (1942 г). Переходные процессы в простейшей релейной следящей системе были построены в работе В. К Попова и С. Л. Кабакова [1] (1945 г.) Исследование влияния трения, запаздывания и зоны нечувствительности на поведение релейной следящей системы и сравнение различных способов стабилизации составляют содержанке работы Вейса [1] (1946 г.), которая, по существу, представляет собой изложение и развитие результатов работы К. Ф. Теодорчика [1], упомянутой выше. Вейс [2] (1951 г.) рассмотрел также влияние трения в релейной следящей системе с муфтами. Метод фазовой плоскости применялся Н. И. Чистяковым (19.46 г.) для исследования простейших контактных следящих систем при наличии запаздывания, люфта, зоны нечувствительности. Изложение этих результатов приведено в его книге [1] (1950 г.). Подробное рассмотрение простейшей релейной системы автоматического регулирования температуры принадлежит Г. Б. Гершеновичу [1] (1946 г.), применившему для этой цели как метод припасовывания, так и приближенный метод гармонического баланса. В работе Я. И. Николаева [1] (1947 г.) на основе метода точечных преобразований А. А, Андронова проведено детальное изучение релейной системы с одной степенью свободы Фазовая плоскость совместно с методом припасовывания применялась в работах Флюгге-Лоц [1] (1947 г.), Флюгге-Лоц и Клоттер [1] (1948 г.). Результаты этих работ подытожены в книге Флюгге-Лоц [2] (1959 г.). Интересная особенность этой книги состоит в применении косоугольной системы координат фазовой плоскости, угол между осями которой зависит от параметра системы. Это обстоятельство существенно упрощает построение фазовых траекторий. В работе автора [1] (1947 г.) рассмотрена простейшая двухпозиционная система регулирования с запаздыванием и сопоставлены результаты точного исследования и приближенного. Серия работ С. Г. Герасимова [1, 2] (1947 г.), [3] (1948 г.) и работа В. Д. Миронова [1] (1947 г.) посвящены построению при помощи графоаналитического метода процессов в простейших системах регулирования температуры с постоянной скоростью сервомотора при учете запаздывания в объекте и при различных законах регулирования. Полное исследование влияния неоднозначности релейной характеристики и обратных связен иа поведение простейшей релейной системы на основе исследования ее фазового портрета было проведено в работе А. А. Фельдбаума [2] (1949 г.). Аналогичные задачи при помощи подобного же метода рассматривали Мак-Кол [11 (1945 г.), В. А. Криволуцкий [1] (1948 г.), В. В. Казакевич [1] (1950 г.), [2] (1951 г.), В. В. Петров и Г. М. Уланов [1] (1950 г.), [2] (1952 г.), Роджерс и Харти [1] (1950 г.), В. М. Шляндин [1] (1952 г.) и др. Для изучения простейших релейных систем с гистерезисом в работах В. В. Казакевича [1] (1950 г.), [2] (1951 г.), а также в работах В. В. Петрова и Г. М. Уланова [2 (1951 г.) применялась многолистная фазовая плоскость. Релейные системы с одной степенью свободы и двумя нелинейностями составили содержание работ В. В. Петрова [1] (1951 г.). Системы с несколькими релейными элементами с точки зрения установления условий автономности рассматривались Ю. Г. Корниловым [.3] (1951 г.). Влияние нечувствительности (трение, зазоры) на процессы в простейшей системе непрямого регулирования с помомп ю графоаналитического метода построения процессов исследовал Ю. Г. Корнилов [1] (1950 г.), [2] (1951 г) Ю. В. Долголенко [2] (1954 г.) на основе построения фазового портрета подобной системы более полно изучил влияние на процесс различного рода нечувствителыюстей. Ряд конкретных вопросов, касающихся двухпозиционных и вибрационных регуляторов, был рассмотрен в работах С. Ф. Чистякова [1] (1948 г.). Б. И. Рубина [1] (1948 г.), Л. В. Цукерника [1] (1948 г.), Г. Р. Эггерса (1948 г.), С. И. Бернштейна [1] (1951 г.), Н. А. Фуфаева [1] (1953 г.), 2] (1955 г.), А. С, Алексеева [1] (1955 г.), А. А. Кампе-Немм [1] (1955 г.). В работах С. И. Бернштейна, Н. А. Фуфаева, А. С. Алексеева применены методы теории нелинейных колебаний. Более сложные релейные системы, исследование которых невозможно провести при помощи фазовой плоскости или элементарных построений процесса, подобных применявшимся в упомяиутйх работах, были рассмотрены в работах Н. В. Бутенина, в фундаментальных работах А. А. Андронова и его сотрудников и в работах ряда других авторов. В работе Н. В. Бутенина [2] (1943 г.) рассматривались автоколебания стенда с автопилотом. Периодическое решение определялось методом припасовывания и было представлено как в замкнутой форме, так и в виде ряда Фурье. Исследование фазового пространства в этой работе производилось приближенным методом Ван дер Поля. В работах А. А. Андронова и Н. И. Баутина рассмотрена задача о стабилизации курса самолета автопилотом с сервомотором постоянной скорости как без зоны нечувствительности [11 (1944 г.) так и при наличии последней [2] (1945 г.). В работе А. А. Андронова, Н. И. Баутина, Г. С. Горелика [1] (1945 г.) исследовано поведение системы с регулятором винта изменяемого шага, содержащим сервомотор постоянной скорости. Решение этих задач дается иа основе разработанного авторами строгого метода точечных преобразований поверхностей. Этим же методом А. А. Андроновым, Н. Н. Баутиным и Г. С. Гореликом [2] (1946 г.) решена до конца в числе других задача об учете влияния сухого трения в чувствительном элементе на процесс непрямого регулирования с сервомотором постоянной скорости при учете зоны нечувствительности. Применение метода точечных преобразований А. А. Андронова дало возможность без всяких допущений качественно и количественно произвести разбиение фазового пространства на области, содержащие траектории различного типа, и получить полную картину влияния параметров регулятора на процесс регулирования. Метод точечных преобразований широко использовался в работах И. Н. Крутовой [1-3] (1959 г.) и в монографии Н. С. Горской, И. И. Круто-вой, В. Ю. Рутковского [1] (1959 г.) для исследования динамических свойств нелинейных и, в частности, релейных сервомеханизмов, описываемых нелинейными дифференциальными уравнениями второго, а иногда и третьего порядков. Эта монография содержит ряд полезных соо-вношений, позволяющих произвести исследование и расчет различных электропневматических, гидравлических, электрических релейных сервомеханизмов. Она снабжена довольно подробной библиографией работ, посвященных релейным автоматическим системам с одной степенью свободы. В связи с потребностями космической техники возникла необходимость исследования релейных следящих систем как с устойчивой, так и неустойчивой линейной частью. Для этой цели А. Д. Беленьким и Э В. Гаушусом [1,2] (1970 г.) был применен метод точечных преобразований. К этому направлению относится также исследование Э. В. Гаушуса и И. Д. Смольянинова [1] (1970 г.). В настоящее время метод точечных преобразований или, как его сейчас называют, метод пространства состояний, находит широкое применение. Весьма интересна попытка использовать его для анализа нелинейных систем с несколькими степенями свободы на основе метода сечений пространства параметров, развиваемого Р. А. Нелепиным [1] (1967 г.). Физические соображения относительно устойчивости релейных систем были изложены в статье Г. Н. Никольского [2] (1948 г.), которая является развитием его прежней работы. А. Г. Ивахненко и О. М. Крыжановский [1] (1948 г.) использовали результаты Г. Н. Никольского для исследования конкретных релейных систем. Задача об устойчивости положения равновесия релейной автоматической <;истемы в. мал.ом была поставлена авто]зом и решена , если можно так ска.- 1 ... 50 51 52 53 54 55 56 57 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |