


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 47 48 49 50 51 52 53 ... 57 § 14.7. Пример Рассмотрим релейную экстремальную систему, структурная схема которой приведена на рис. 14.11. Отклонение от экстремума здесь определяется производной выходной координаты объекта. ссТр+1 Р У Рнс. 14.П. Структурная схема релейной экстремальной системы. Передаточные функции линейных блоков равны (14.53) аГр+1 Исполнительное устройство имеет передаточную функцию иу- . (14.54) а направление поиска переключается по производной выходного. Сигнала. Поэтому Ap) = jj, Ар) = -. (14.55) Вычислим годограф релейной экстремальной системы. Заметим, что И значит. Г,о((0) = 120 (со) = V Г + 1 и ei((o)==:----arctg (оГ, , - и 62 (со) = - - arctg (оГ. Полагая в этих выражениях вместо со и подставляя их в (14.35) и (14.36), получим согласно (14.34) 1т/(со) = -2 2 11 (со, п, т)со8ф, (со, п, т) - - /42(со, п, т)со8ф2((о, п, т)], (14.58) 2 оо оо п-1 т=1 Re / (со) = - 2 [Л, (со, п, т) sin ф, (со, п, т) - Л2(со, rt, т)з1Пф2(со, rt, т)]. (14.58) ( - mY со /1=1 m=l Здесь Л, (со, п,т) = -Л2 (со, rt, m) = (2n-{Y(2m-\Y~YR ( + /и - 1) со (14.59) (14.59) где R = Х[а2Г(п т)2со2+ 1], Г2(2п-1)2+ l] [г (2m-1)2+ 1]X X[a2r2(rt + m -l)2(o2+ 1], Ф, (co, и, m) = arctg- Г (2n - 1) --arctg-- Г (2m - 1) + + arctg асоГ (rt - m), (14.60) Ф2 (co, n, m) -= arctg Г (2n - 1) + arctg -- Г (2m - 1) + -farctgacur(n + m -1). (14.60) Можно годограф релейной экстремальной системы представить и в замкнутой форме. Так, принимая во внимание (14.55) и замечая, что Pq==0. Р\ = - Я\ (14.61) получим по формулам (14.38), (14.39) после элемёйтарйых преобразований Im/(w) = - 2kklT 1 -е 2я иоГ -(!+ ) + 4-2а + (1-а) (Г-2а)\1 +е 4я (оаГ (1 -а)П1 -Ье 2л 2п (оГ 4е 4-2а--(1-а) 2л (1-2а) 2я \2 < / 2п \ [l+e -j (l-aAl+e Ч (14.62) Re/((o) = 2 8fefe г L 1 +e 2T [я V o tor J l+e 2я (оГ (14.63) Условия существования периодического режима имеют обычный вид: Im /((о) = - Ио, \ Re/N<0. ) - А где 1т/(со) и Re/(со) определяются выражениями (14.58), (14.58) или (14.62), (14.63). Определение параметров автоколебаний осуществляется с помощью обычной графической интерпретации условий (14.64). Иногда удобнее пользоваться аналитическими условиями существования, которые согласно (14.62) - (14.64) имеют вид: 2fefer 2л 1-е -(!+ ) + + (!+ ) + 2а 2л + (1-а) / 2я \г / 2я (l~2a)ll+e (l-a)4l-e g СМОГ 4я tor 4-2a-(l-a) (l-2a)(l+e (i a)2(l-l-e ) = -Ио (14.65) Ll+e -(4 + ) (14.65) 1 -е Решение трансцендентного уравнения (14.65) относительно соГ определяет зависимость частоты от параметров, т. е. (оГ = ¥(хо, а). (14.66) Эта зависимость изображена сплошными линиями на рис. 14.12 при фиксированных значениях а = 0,5, а = 2. 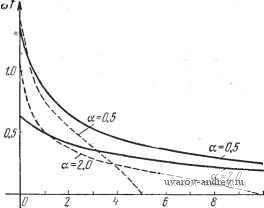 Рис. 14.12. Зависимость относительной частоты колебаний (оГ от v. при фнсированных а. Сплошная кривая-результат точного метода, пунктирная-результат приближенного метода. Рассмотрим, как изменятся результаты расчета, если воспользоваться приближенным выражением годографа /(со), в которое входит только первая гармоника. Из (14.40) при 12(0)== = 0 и Wi(/(o), 2(У(о), определяемых по (14.56), получаем Г + 1 2 аусоГ -Ь 1 г (14.67) Этот же результат после несложных преобразований следует из (14.58) и (14.58). . Условия существования периодического режима (14.64) принимают следующий вид: 32fep arctg -у 7 arctg o.co7j <0. Из (14.68) после преобразований получаем я= 4(2-fa)-ag>r - mkkiT (wf-+4) {aW +1) ; (14.68) (14.680 (14.69) Зависимость соГ от ио при фиксированных а = 0,5 и а = 2, построенная по (14.69), изображена пунктиром на рис. 14.12. Сопоставление результатов точного и приближенного анализа автоколебаний показывает, что точность последнего, вообще говоря, удовлетворительна в сравнительно узком диапазоне изменения а *). Важным показателем качества экстремальной системы являются потери на поиск, которые оцениваются величиной л :z(t)\dt. (14.70) Подставляя в (14.70) z{t), вычисленные в соответствии с (14.27), получим -1 + (14.71) Зависимость потерь на поиск А' от величины щ показаны на рис. 14.13 сплошными линиями. Приближенно потери на поиск можно оценивать по величине эффективного значения амплитуды колебаний выходной величины объекта z{t). Из (14.68) будем иметь = - ---г-,-г. (14.71) Эта зависимость показана на рис. 14.13 пунктирными линиями. *) См, и. с. М о р о с а н о в [1], Ю. И. А л и м о в [1]. в выражения Д' и Д входит относительная частота автоколебаний (йТ, которая в свою очередь зависит от ио и а. Поэтому потери на поиск Д' и Д также определяются указанными параметрами. На рис. 14.13 изображены зависимости Д' и Д от хо 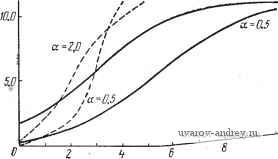 Рис. 14.13. Зависимость потерь иа поиск Д от Ио при фиксированных а. Сплошная кривая-результат точного метода, пунктирная-результат приближенного метода. при а = 0,5, а = 2. Из рис. 14.13 следует, что для некоторых диапазонов изменения щ расхождение между точными и приближенными значениями потерь на поиск может быть большим. Таким образом, приближенный метод может привести к существенным погрешностям.. ПРИЛОЖЕНИЯ В настоящих приложениях приводятся основные сведения по преобразо -ванию Лапласа, рядам Фурье и импульсивным функциям, которые в той или иной мере были использованы в предыдущих главах книги. Кроме того, здесь также приведены таблицы, полезные при расчете релейных систем. 1. Преобразование Лапласа Преобразованием Лапласа называется линейное преобразование некоторой функции /(<) вещественного переменного t в другую функцию F(p) комплексного переменного р, определяемое соотношением f (р)= f e-Pf(t)dt. . (1) Функция f{t) называется оригиналом, а функции F{р) - изображением. Соотношение (1) часто сокращенно записывают в виде Fip)f(t)- (2) Операцию, которую необходимо проделать над оригиналом, чтобы получить изображение, часто сокращенно обозначают как J e-P*f{t)dt = L{f{t)} (3) о и тогда F(p) = L{fm , (4) Приведем простой пример соответствия (3). Пусть / = е . Подставляя STO значение в (1), получим При а- -О найдем изображение единичного скачка /(/) = f (p) = L{l (0} = у. Одним из важнейших свойств преобразования Лапласа, которое предопределило широкое применение его для решения самых разнообразных задач физики и техники, является упрощение операций над изображениями по сравнению с операциями над оригиналами. Так, дифференцированию и интегрированию оригиналов соответствуют более, простые операции умножения и деления. Поскольку преобразование Лапласа линейно, то изображение суммы оригиналов равно сумме изображений оригиналов. Благодаря всем этим свойствам дифференциальное уравнение относительно оригинала заменяется алгебраическим уравнением относительно изображения. Полученное алгебраическое уравнение решается относительно изображе ния искомой функции. Таким образом, определяется изображение решения. По этому изображению тем или иным способом находится оригинал. При этом можно воспользоваться либо готовыми таблицами соответствий оригиналов и изображений, либо применением формул обращения или формул разложения, позволяющих по данному изображению найти оригинал. Эту последнюю операцию сокращенно обозначают в виде f{t)=L-{F{p)]. (5) Теория преобразования Лапласа подробно изложена в ряде руководств по операционному исчислению и, в частности в книгах М. Й. Конторовича [1], М. Гарднера и Д. Бэрнса [1], А. И. Лурье [3], Д ё ч а [1] и др., к которым мы и отсылаем читателя за подробностями. Здесь же мы ограничимся формулировками основных теорем преобразования Лапласа, которые использованы в тексте книги, и кратким указанием способа их доказательства. Более подробные указания читатель.найдет в упомянутой литерату1?е. Теорема 1. Линейность преобразования Лапласа L ( S vfv (О I = S vi {fv {t)) = 2 aFv ip). (6) lv=I J v=l v=l Изображение линейной комбинации оригиналов равно линейной комбинации их изображений. J Эта теорема следует из линейности преобразования Лапласа (1). Теорема 2. Дифференцирование оригинала L{f{t)] = pL{}{t)]-f(0) = pF{p)-f{0), (7) L {f (t)} = pL [f (t)} - pf (0) - / (0) = pF (p) - pf (0) - f (0) (7) и в общем случае L. { МО } = (f U)) - S p - f (0) = pF (p) - p -* f (0). (8) й=1 й=1 Первое из выражений получается интегрированием (1) по частям. Последующие соотношения получаются последовательным применением (7) к соотно- шению L I МО = pi-I f W - f (0). В этих соотношениях f (0) =0 представляют собой значения оригиналов и их производных при t = 0. Если эти значения равны нулю (fe) f (0)=0. fe=0, 1, 2.....n-l, (9) то из (8) получаем L\nt)] = rL{f{t)} = pF(p). (10) При выполнении условий (9) п-кратному дифференцированию оригинала соответствует умножение изоб.ажения на р . Теорема 8. Интегрирование оригинала. Пусть f{t)dt= f(t)dt + c. Тогда Если с = 0. то it) dt = jL{f(t)]: F(P) (12) (13). Интегрированию оригинала от нуля до / соответствует деление изображения на р. Соотношение (13) можно получить интегрированием (1) по частям. Теорема 4. Смещение аргумента оригинала (теорема запаздывания) LUit- т)} = e-PL {f (t)} = e-iF (p). (14) причем /( - т) = О при / < т. Смещению аргумента оригинала на постоянную величину т соответствует умножение изображения на е Соотношение (14) вытекает из определения преобразования Лапласа (1), примененного к /( - т), после замены переменной интегрирования t на /j -f-т. Теорема 5. Смещение аргумента изображения F{p + a)=L{e-*f(t)}. (15) Смещению аргумента изображения на постоянную величину а соответствует умножение оригинала на Эта теорема является взаимной к предыдущей. Она-следует из основного соотношения (1), если в нем заменить р на р + а. Теорема 6. Изменение масштаба аргумента оригинала (изображения) L{f(at)}: (16) Изменению масштаба аргумента оригинала в а раз соответствует изме- нение масштаба аргумента р и самого изображения в - раз. Соотношение (16) следует из(1) после замени в нем t на at. Теорема 7. Умножение изображений (теорема свертывания) е) h (е) dB h (e) h (t - e) = L{h(t)}L{U{t)}Fi(p)h{p)- (17) Теорема свертывания позволяет найти оригинал, соответствующий произведению двух изображений. Равенство (17) можно получить, умножая (1) на р2.{р) и применяя затем теорему о смещении аргумента оригинала (теорема 4). Теорему свертывания можно. также установить из физических соображений, рассматривая воздействие скачкообразных функций, аппроксимирующих один из оригиналов. на линейную часть системы, импульсная характеристика которой равна втб-рому оригиналу. Теорема 8. Предельные значения lim (р)= lim /(0 = f(0), (18) р- оо t->0 lim pF(p)= lim f(0 = f(oo), (19) t->0 t->os> если эти пределы существуют. Эта теорема по изображению F(p) позволяет найти значения оригинала при < = О и f = оо. Соотношения (18) и (19) следуют из (7), если в нем устремить t к нулю и к бесконечности. Приведенные выше теоремы играют важную роль при решении различных задач. Существующие таблицы соответствий между оригиналами и изображениями позволяют определять оригиналы по изображениям и обратно. Ниже приведена небольшая таблица П.1 соответствий, которые были использованы в тексте. Пусть изображение, соответствующее оригиналу h{t), представляет собой дробно-рациональную функцию где Q(p) -многочлен п-й степени, а Р(р) -многочлен не выше п-й степени. Найдем оригинал этого изображения. Предположим пока, что уравнение Q(p) = 0 (21) имеет все корни pi, pz, рп простые и отличные от нуля. Тогда можно (20) разложить на элементарные дроби: п Я(р) = -+У-(22) Р р - Pv где коэффициенты Соо и с^о находятся по формуле *) Cvo = lim н (р) (р - Pv). - (23) P->Pv Используя (23), легко получить, что соо-. Cvo = . v = 1.2..... . (24) Но из таблицы соответствий (табл. П.1) следует, что -L[im -!--Lie }. . р p-pv Принимая это во внимание, после перехода от изображения (22) к оригиналу получаем А(0 = Соо+Scv3e4 (25) *) Чтобы получить (23), надо умножить (22) на p-Pv и затем устремить р к Pv. 1 ... 47 48 49 50 51 52 53 ... 57 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |