


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 ... 22 23 24 25 26 27 28 ... 57 1 у P(pv) e (0 2j Q v==l Q (Pv) I -e 2Л Q (Pv) Pv 2Л 1 -e -r 2 . (6.870 Если же линейная часть нейтральна, т. е. передаточная функция имеет простые полюсы, в том числе нулевой рп - О, то выражения для годографов /i(to) и /((о) будут иметь вид Р(0) п V P(Pv) l-e re-t pvc-v,)! Q,(0) v=i (Pv) Pv 1 -e I Y p (Pv) 1 - 1 -e 2Л (6.88) /y(co) = -2/jp P(0) Q;(0) P(Pv) 1-е 2n Q (Pv) 1 -e 2П , P(0) \ i: , у P(Pv) 1 -e Q,(0)- со tlQi(Pv)pv , 1 б (6.880 где, напомним, Co,=-(-j В отличие от (6.87) и (6.870 в (6.88) и (6.880 Yi - фиксировано. § 6.5. Годографы связных релейных систем Для связных релейных систем согласно (6.11) а,=0 и /г = 1, 2, iV. Рассмотрим подробнее случай двухсвязной релейной системы, т.е. N = 2; тогда h{co) = (6.90) k=l, 2. Строя годограф /i(co) (рис. 6.20) и семейство годографов /2(00) (рис. 6.21) при различных значениях 2 и проводя прямые -хой
 Рис. 6.20. Годограф /[((о) и прямая -Им. К определению Юо. Рис. 6.21. Семейство годографов h (m) параметра а и прямая -K . К определению а. (/г = 1, 2), определяем по /i(co) (рис. 6.20) частоту автоколебаний со = соо, а по /2(со) (рис. 6.21) то значение сдвига фаз 2. при котором h (сОо) = -х02. Годографы релейной системы /i(co) и /г (со) вычисляются по частотной или переходной характеристике или по передаточной функции линейной части. Ограничимся здесь получением годографов релейной системы по частотным характеристикам. Поскольку, согласно (5.84), Zsk{t) = 2m- 1 sin [(2m - 1) co -f e ((2m - 1) со)] И, значит. ife(0=- - r,feol(2m-l)co]cos[(2m-l)coi + e((2m-l)co)], то, учитывая, что в общем случае Находим после обычных преобразований п .iJ 2m - 1 2m- I (6.91) .п(1) + г2(1) (; [(2т-1)со]-й) (0) 5;[C/,2(2m-l)co]--Jt2)2,(0)] (6.91) Im /2(0) = - 2,2 (- + 2) - 222(- + 2) = fep t/,2 ((2m - 1) to) + fe<ft/22 ((2 - 1) to) 2m- 1 sin(2m -l)cйa2 4- ft>V2 ((2m - l)to) + A:[fV22((2m - 1) CO) 2m- 1 cos(2m-l)coa2 (6.92) Re /2 (со) = - [1,-2 (1 + 2) + 42 ( + 2)] = = 1 {fft(,>f/,2((2m- l)co)+/j2)[/((2m 1) co)]cos(2m - l)cocj2~ -K F,2((2m -I)co) + /jf l/22((2m -l)co)jsin(2m-l)coa2}- (6.92) в выражении (6.9Г) ш„ (0) = lim pWsx (Р) = I f t/.i (со) dco, s = 1, 2, ... (6.93) Определение годографов /i(co) и /2(to) no передаточным функциям хотя и возможно, но довольно громоздко. Поэтому мы здесь не будем приводить даже конечных результатов*). § 6.6. Способы повышения частоты автоколебаний Если не принять соответствующих предосторожностей, то автоколебания, возникающие в релейной автоматической системе, приводят к столь значительному изменению выходной величины линейной части z{t), что релейная система становится неработоспособной. Для уменьшения изменения z{t) необходимо либо устранить автоколебания либо увеличить частоту возможных автоколебаний. Последнее следует из того, что модуль частотной характеристики линейной части системы Uo(co) обычно с ростом частоты стремится к нулю и, следовательно, чем выше будет частота автоколебаний, тем на основании выражения (5.13) будет меньше изменение z(t). В связи с этим важное значение приобретают способы увеличения частоты колебаний или, если это возможно, устранения этих колебаний. Разумеется, при повышении частоты автоколебаний условия работы релейного элемента ухудшаются и требования к его надежности повышаются. Одним из простейших и очевидных способов устранения автоколебаний в том случае, когда линейная часть системы устойчива или нейтральна, является увеличение зоны нечувствительности (например, увеличение межконтактного промежутка релейного элемента). Но увеличение зоны нечувствительности сопряжено с уменьшением точности регулирования, что практически не всегда желательно. Поэтому далее рассматриваются релейные автоматические системы без зоны нечувствительности, если не оговорено обратное. С одной стороны, это существенно упрощает исследование, а с другой стороны, пренебрежение зоной нечувствительности приводит к некоторому запасу при расчете автоколебаний. Рассмотрим релейную автоматическую систему при наличии положительного гистерезиса, т. е. при хо > 0. *) Способ определения несколько иных годографов связных релейных систем описан Атертоном [1]. в такой релейной системе, как. уже было отмечено выше, автоколебания неизбежны. Частота этих автоколебаний определяется точкой пересечения годографа релейной системы /(ш) с прямой -У.0 (рис. 6.22). Изменение частоты возможных автоколебаний можно получить изменением параметров релейного элемента или линейной 
j/mlicjD ReJiot  jlmJiu) Relftij  Рис. 6.22. Увеличение частоты возможных автоколебаний уменьшением к„о (а), увеличением коэс)фициента усиления (б), в -соответствуют / (ш) при fto=l, Ио>0, г - / ) при Ао = 1, Ио<0. части системы. К увеличению частоты приводит, естественно, уменьшение хо либо увеличение коэффициента усиления релейного элемента или линейной части системы. В первом случае прямая -Хо смещается к началу координат (рис. 6.22,а), а во втором случае меняется масштаб /(ю) (рис. 6.22.6). Как следует из рис. 6.22, в, где изображен годограф релейной системы У (со) при feo = 1 и прямая -эти оба случая эквива- лентны. На рис. 6.22,в изменение масштаба /(со) заменяется изменением масштаба осей. Далее мы этим обстоятельством будем пользоваться. Изменение ko и хо может увеличить частоту автоколебаний лишь до значения со , которое получится при хо = 0. Заметим попутно, что при Хо = О коэффициент усиления ko не влияет на частоту возможных автоколебаний. Если cog невелико, то описанный способ повышения частоты возможных автоколебаний существенно ограничен в своих возможностях. Частоту автоколебаний можно сделать большей сОд, если ввести отрицательный гистерезис, соответствующий изменению хо на -Хо и, следовательно, изменению направления переключений. В этом случае прямая -г^- пройдет выше оси абсцисс, и частоты и со будут большими, чем а>° (рис. 6.22,г). Повышение частоты возможных автоколебаний можно получить изменением параметров линейной части системы. 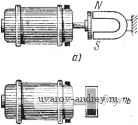  Рис. 6.23. Способы уменьшения электромеханической постоянной времени. Так, например, из рассмотрения годографа релейной следящей системы /((о) можно видеть, что уменьшение электромеханической постоянной времени Гм приводит к увеличению частоты автоколебаний, если хо =5 0. Это следует из того, что одной и той же относительной частоте m == шГм соответствуют тем большие значения to, чем меньше Гм. В частности, применение реверсивных фрикционных или электромагнитных муфт позволяет существенно уменьшить момент инерции, а следовательно, и электромеханическую постоянную и тем самым повысить частоту возможных автоколебаний. Примеры релейных автоматических систем с электромагнитными муфтами были приведены в § 1.1. Если выбор тех или иных элементов релейной автоматической системы ограничен, как обычно бывает на практике, то изменение параметров этих элементов можно получить искусствец-ным путем: введением демпферов, обратных связей и т. п. Некоторые способы уменьшения электромеханической постоянной времени двигателя изображены на рис. 6.23. в качестве способа введения демпфирования могут быть использованы вихревые токи, индуктируемые во вращающемся медном диске неподвижным магнитом (рис. 6.23,с). Создаваемый при этом момент пропорционален угловой скорости вращения диска. Такой же момент может быть создан также инерционным демпфером (рис. 6.23,6). Эти способы увеличения демпфирования, приводящие к уменьшению электромеханической постоянной времени двигателя, отличаются той особенностью, что при их введении необходимая мощность двигателя увеличивается и установившаяся скорость его уменьшается. В отличие от этих способов, электромеханическая постоянная времени может быть уменьшена за счет увеличения момента сопротивления, пропорционального не абсолютной, а относительной угловой скорости вращения оси двигателя при помощи устройств, показанных на рис. 6.23, виг. Внутри полого маховика, укрепленного на оси двигателя (рис. 6.23,в), помещается ртуть. При ускорениях маховика вследствие инерционности ртуть благодаря трению о стенки маховика создает момент сопротивления, пропорциональный относительной скорости маховика по отношению к ртути. Тот же эффект достигается благодаря вихревым токам, индуктируемым в медном диске магнитом относительно большой массы, который связан через подшипник с осью двигателя (рис. 6.23,г). При постоянной скорости вращения оси магнит вращается с той же скоростью. Относительная скорость диска по отношению к магниту равна нулю. Но как только скорость вращения оси изменится, возникнет момент сопротивления, пропорциональный этой относительной скорости. Для усиления этого эффекта иногда магнит связывают с осью пружиной. Одним из средств изменения параметров элементов линейной части системы может служить введение внутренней обратной связи. Предположим, что передаточная функция элемента равна Охватим этот элемент обратной связью, причем передаточную функцию элемента обратной связи выберем равной /2(Р) = Р. (6.95) что соответствует жесткой внутренней связи. Тогда передаточная функция такого соединения согласно формуле (2.28) будет равна или, обозначая Г = , д,р = у+ окончательно получаем откуда следует, что при введении жесткой внутренней связи постоянная времени Т' и коэффициент усиления k элемента изменяются. Они уменьшаются при > О и увеличиваются при - 1<*р<0. Если этот элемент с передаточной функцией Ki{p) охватить обратной связью элементом с передаточной функцией /2 = PP. (6.97) что соответствует упругой внутренней связи, то согласно формуле (2.28) передаточная функция такого соединения будет равна (р)=Гр-ц\а=рр или, обозначая Т' - Т -\- kp, k = k, получаем (Р)=Г^- (6.98) Отсюда следует, что при введении упругой внутренней связи указанного вида коэффициент усиления элемента k остается неизменным, а постоянная времени Т' изменяется. Она уменьшается при Ар < О, Ар < Г и увеличивается при kp > 0. Таким образом, применяя соответствующие обратные связи, можно изменять параметры линейной части системы, а следовательно, и частоту возможных автоколебаний. Так как изменение параметров линейной части приводит к расширению полосы пропускания частот, то, вообще говоря, тах|2(/) может и не уменьшаться с ростом частоты. Однако при этом будет уменьшаться выходная величина устройства, на которое воздействует релейная система, а также увеличиваться быстродействие последней. Весьма эффективное средство повышения частоты возможных автоколебаний, специфичное для релейных систем, состоит в введении так называемой замедленной внутренней связи*), охватывающей релейный элемент (рис. 6.24, й) или жесткой, упругой внутренней связи, охватывающей релейный элемент совместно с некоторыми элементами линейной части системы *) Замедленная внутренняя связь тождественна релаксационной связи, изученной В. Л. И и о с о в ы м, см. А. Г. И в а х н е н к о [2]. Подобное исследование влияния внутренней обратной связи проведено Н. А. Королевым [1]; см. также работу автора [11]. (рис. 6.24,6). Заметим, что этот последний случай приводится к первому с той только разницей, что элемент обратной связи теперь включает в себя и некоторые элементы линейной части системы (рис. 6.24, в). Как видно из рис. 6.24, а, в, охват релейного элемента обратной связью равноценен введению дополнительных элементов (2>-(2>*- L- вое вое вое лч - Рис. 6.24. Системы с внутренней обратной связью или с ycкopяющIмн элементами. параллельно линейной части системы. Эти дополнительные элементы будем называть ускоряющими. При наличии ускоряющих элементов входная величина релейного элемента, т. е. управляющий сигнал, будет равна сумме двух величин: выходной величины линейной части системы и выходной величины ускоряющего элемента. Годограф релейной автоматической системы /(ш) (рис. 6.25, кривые S) согласно определению (6.1) найдется как сумма годографов, соответствующих релейной системе без ускоряющих элементов /i(to) (рис. 6.25, кривые /) и релейной системе, в которой линейная часть представляет собой ускоряющие элементы /2((о) (рис. 6.25, кривые 2). Если ускоряющие элементы выбрать такими, чтобы годограф /2(0)) лежал в нижней части Плоскости /, то добавление его к годографу /j (ш) приведет к такому изменению последнего, при котором частота возможных колебаний повысится. Это является следствием того, что мнимая часть годографа релейной системы уменьшается благодаря введению ускоряющего элемента, а вместе с тем, как видно из рис. 6.25, частота возможных колебаний, определяемая суммарным годографом /(со) = /,((о) + /2И (6.99) (рис. 6.25, кривые 3), повышается (рис. 6.25,а), либо колебания вовсе устраняются (рис. 6.25,6).  ReI((J) 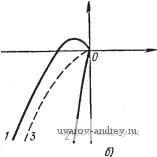 Рис. 6.25. Увеличение частоты возможных автоколебаний с помощью ускоряющих элементов: / - годограф релейной си тем без ускоря щего э мен а 2-годограф, соответствующий ускоряющему элементу. 3 -суммарный годограф. Передаточные функции К{р) типовых ускоряющих элементов приведены в табл. 6.4. В этой таблице также приведены выражения годографов /2(0)), их качественный вид, а также качественный вид частотных характеристик ускоряющих элементов. Как видно из таблицы, годографы /г(га) ускоряющих элементов расположены в третьем и четвертом квадрантах. Поэтому прибавление /г (га) к годографу релейной системы уменьшает мнимую часть последнего, а следовательно (в обычных случаях), увеличивает частоту возможных автоколебаний. Увеличение частоты возможных автоколебании может быть также достигнуто введением в управляющий сигнал производных регулируемой величины. В этом случае схема релейной системы будет иметь вид, изображенный на рис. 6.26, а. Эту схему можно также привести к ранее рассмотренной схеме с ускоряющим элементом (рис. 6.24,g, б). Роль ускоряющего элемента будет играть линейная часть, последовательно соединенная с дифференцирующими элементами. Однако этот путь весьма ограничен из-за невозможности осуществления идеальных дифференцирующих элементов. 1 ... 22 23 24 25 26 27 28 ... 57 |
|||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |