


|
|
|
|
Главная страница » Электрика в театре » Автоматические релейные системы 1 2 3 4 ... 57 автоматические релейные системы Автоматическая система управления может быть приведена К функциональной схеме, изображецной на рис. В.1. Здесь обозначено: / - регулируемый объект, 2 - измерительное устройство, 3 - задающее устройство, 4-сравнивающее устройство, 5 - управляющее устройство, 6 - усилительное устройство, 7 - исполнительное устройство, 8 - внутренняя связь. рис. B.I. Функциональная схема автоматической системы управления. В частных случаях некоторые из этих элементов могут отсутствовать. Так, в ряде автоматических систем отсутствуют внутренняя связь (системы без внутренней обратной связи), усилитель (системы прямого регулирования). Часто некоторые из этих элементов конструктивно объединены, например, измерительное, задающее и сравнивающее устройства или управляю- , Щее и усилительное устройства. Измерительное устройство измеряет регулируемую величину. Измеренная регулируемая величина сопоставляется в сравни* вающем устройстве с величиной, которая устанавливается при Помощи задающего устройства. Разность этих величин, называе- ?зя отклонением или ошибкой, воздействует на управляющее устройство, в котором формируется управляющий сигнал, соответствующий тому или иному закону управления. В простейшем случае управляющий сигнал зависит только от отклонения регулируемой величины. В общем случае он может зависеть не только ет отклонения регулируемой величины, но и от производных или интегралов отклонения, а также от иных величин, характеризующих состояние системы или внешнего воздействия (например, от нагрузки). Так как мощность управляющего сигнала невелика, то обычно ее увеличивают при помощи усилителя. Эту усиленную в той или иной форме величину управляющего сигнала, воздействующую на исполнительное устройство, можно назвать управляющим воздействием. Управляющее воздействие при помощи исполнительного устройства изменяет соответствующим образом положение (или состояние) регулирующего органа, который мы не выделили в функциональной схеме, считая, что он относится к регулируемому объЬкту. Благодаря воздействию исполнительного устройства на регулирующий орган объекта изменяется в конечном итоге значение регулируемой, или управляемой, величины. По характеру управляющего воздействия системы автоматического управления можно разделить на непрерывные автоматические системы, импульсные автоматические системы и релейные автоматические системы. В непрерывных автоматических системах управляющее воздействие непрерывно и в каждый момент времени определяется значением управляющего сигнала в тот же момент времени. Если усилительное устройство линейно и безынерционно, то управляющее ВОЗД€ПСТВИ£ прямо ПрХ5ТГОр- ционально управляющему сигналу (рис. В.2). Статическая характеристика усилительного устройства, определяющая связь между управляющим воздействием и управляющим сигналом, представляет собой в общем случае непрерывную кривую (рис. В.З,а), а для линейного усилительного устройства - прямую (рис. В.З, б) линии, проходящие через начало координат. Импульсные автоматические системы характеризуются тем, что в них управляющее воздействие не непрерывно, а представляет собой последовательность импульсов, равноотстоящих 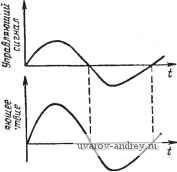 а Рис. в.2. Управляющий сигнал и управляющее воздействие в непрерывных автоматических системах. £5; Управляющий сигнал Управляющий, сигнал Рис В.З. Характеристики усилительного устройства непрерывной автоматической си- стемы; в) - нелинейная, б) линейная характеристика. 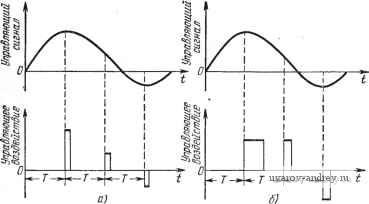 Рис. В.4. Управляющий сигнал н управляющее воздействие в импульсных автоматических системах: а) - амплитудная модуляция, б) -широтная модуляция. 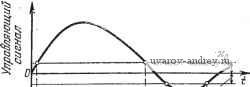 lilt Рве, В.5. Управляющий сигнал и управляющее воздействие в релейных автоматических Управляющий Друг от друга (т. е. с постоянным интервалом повторения), высота или длительность которых пропорциональны значениям управляющего сигнала в^ дискретные моменты времени. В импульсных автоматических системах усилителем является импульсный элемент, преобразующий непрерывный управляющий сигнал в управляющее воздействие в виде указанной последовательности импульсов с постоянным интервалом повторения (рис. В.4,а,б). Иначе говоря, в этих системах импульсный элемент одновременно с усилением производит модуляцию последовательности импульсов по закону, определяемому управляющим сигналом. Характеристика импульсного элемента, связывающая управляющее воздействие и управляющий сигнал, существенно зависит от времени. В релейных автоматических системах управляющее воздействие изменяется скачком всякий раз, когда управляющий сигнал проходит через некоторые фиксированные значения, называемые пороговыми (рис. В.5). В таких системах усилителем является релейный элемент, характеристика которого выражает связь между управляющим сигналом и управляющим воздействием и часто имеет вид, изображенный на рис. В.6, а. Пороговые значения +ко здесь определяют собой зону нечувствительности релейного элемента. Как видно из рис. В.5, для релейного элемента с зоной нечувствительности управляющее воздействие может принимать три значения: наименьшее, наибольшее и нулевое. В предельном случае пороговое значение равно нулю, и тогда характеристика такого идеального элемента принимает вид, изображенный на рис. В.6, б. Далее мы встретимся с более сложными видами характеристик релейного элемента. Если управляющий сигнал неоднократно проходит через пороговые значения, то управляющее воздействие будет иметь вид импульсов постоянной высоты, переменной длительности и, в отличие от итульсных автоматических систем, с переменным интервалом повторения. Рассмотренные типы автоматических систем отличаются друг от друга в основном усилительными устройствами. В непрерывных автоматических системах в качестве усилительных устройств применяются электронные, магнитные, Щ сигнал
Рис. в.6. Характеристики релейного элемента: о) -с зоной нечувствительности, б) -без зоны нечувствительности. электромашинные, гидравлические, пневматические усилители. В импульсных автоматических системах усилитель (импульсный элемент) выполняется в виде разнообразных по схемам и конструкциям импульсных модуляторов. В релейных автоматических системах усилитель (релейный элемент) представляет собой контактное или бесконтактное реле: электромагнитное, электронное, пневматическое. В отличие от непрерывных и импульсных систем, которые в ограниченном диапазоне изменения регулируемой величины часто можно рассматривать как линейные системы, релейные автоматические системы являются существенно нелинейными системами. Теория линейных систем как непрерывных, так и импульсных, достигшая сейчас высокого уровня развития, подробно изложена в большом числе монографий и статей. Настоящая книга посвящена основам теории и методике расчета релейных автоматических систем, охватывающих широкий класс систем регулирования. Релейные автоматические системы могут обладать исключительно большим быстродействием вследствие того, что управляющее воздействие в них изменяется практически мгновенно и исполнительное устройство всегда подвержено максимальному постоянному воздействию. С другой стороны, такое интенсивное воздействие часто может явиться причиной возникновения незатухающих колебаний, или, как их называют, автоколебаний. Появление автоколебаний во многих случаях нежелательно по той причине, что они могут нарушить заданный закон изменения регулируемой величины. Однако существуют релейные автоматические системы, в которых автоколебания являются основным рабочим режимом. К числу таких систем относятся вибрационные регуляторы, системы автоматического регулирования, работающие по принципу открыто - закрыто и т. д. В этих автоматических системах пульсации регулируемой величины, вызываемые автоколебаниями, в значительной мере сглаживаются благодаря фильтрующим свойствам регулируемого объекта, и тем самым Поддерживается среднее значение регулируемой величины. Если релейную автоматическую систему подвергать внешнему периодическому воздействию, то при определенных условиях (так называемых условиях захватывания) ранее существовавшие в ней автоколебания устраняются, но при этом в системе возникают вынужденные колебания с частотой, равной частоте внешнего воздействия, либо с более низкой частотой. При достаточно высокой частоте внешнего воздействия амплитуда вынужденных колебаний той же частоты будет невелика й практически эти колебания не будут проявляться. Таким образом, внешнее периодическое воздействие может служить средством, подавления автоколебаний. Одновременно с этим наличие вынужденных колебаний устраняет влияние сухого трения, люфта, гистерезиса и, как это будет показано далее, придает релейной системе свойство пропорциональности или, как говорят иначе, линеаризует релейную систему. Применяя дополнительные внутренние связи в релейных системах, можно осуществить так называемые скользящие режимы и построить на их основе частотно-импульсные системы. Нелинейные внутренние обратные связи позволяют реализовать оптимальные по быстродействию процессы. Для исследования проектирования, разработки и наиболее эффективного использования релейных автоматических систем необходимо уметь определять зависимость режима работы релейных систем от параметров отдельных элементов, от структуры системы и, наконец, от вида внешнего воздействия. Решение этих задач и составляет предмет теории релейных автоматических систем. Глава 1 РЕЛЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ И ИХ КЛАССИФИКАЦИЯ . § 1.1. Примеры релейных систем Релейные автоматические системы отличаются от непрерывных и импульсных систем наличием в них релейного элемента. Благодаря большому усилению мощности релейньШ элементом, простоте и быстродействию релейные системы нашли широкое применение в различных областях техники. В настоящем параграфе приводится краткое описание ряда различных релейных автоматических систем. Это описание, не претендующее на полноту и подробности, имеет своей целью познакомить читателя с конкретными релейными автоматиче-сйами системами, являющимися объектом изучения настоящей квдги- Системы автоматического регулирования температуры. Простейшим видом регулятора температуры является так называемый двухпозиционный регулятор. Принципиальная схема его приведена на рис. Назначение регулятора сострит в поддержании постоянства температуры электрической печи (термостата). Температура печи / измеряется ртутным термометром 2, в который цпаяны два контакта 5 и . При повышении температуры столбик ртути, замыкая эти контакты, тем самым замыкает цепь реле 5, которое, срабатывая, отключает электрический нагреватель. Благодаря этому температура начнет понижаться. Столбик ртути размыкает контакты 5 и и, следовательно, цепь реле 5 размыкается. Благодаря этому подключается к сети электрический нагреватель 6, и температура начинает повышаться. Этот процесс непрерывно повторяется. На рис, 1.2 приведены схемы систем регулирования температуры печи, нагреваемой газом. Регулятор состоит из измерительного мостика 2, одним из Плеч которого является термометр сопротивления 3. В одну 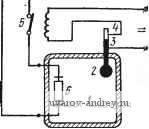 Рис. 1.1. простейшая система автоматического регулирования температуры с двухпозициои-ным регулятором. диагональ мостика включена обмотка 4 чувствительного поляризованного реле, а вторая диагональ питается от источника постоянного напряжения. При отклонении температуры от заданного значения, устанавливаемого задатчиком 5, реле замыкает верхний или нижний контакт 6 или 6 и тем самым включает ту или иную половинку обмотки реверсивного двигателя постоянного тока 7. Двигатель, вращаясь, перемещает вентиль 8, регулирующий подачу газа. Для улучшения динамических характеристик системы в регуляторе часто применяются внутренние (упругие, жесткие, замедленные) связи. Упругая внутренняя связь может быть осуществлена различными способами. 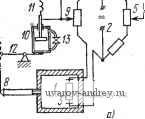 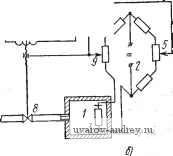 Рис. 1.2. Система автоматического регулирования температуры: а) - с упругой, б) - с жестЕсой внутренней связью. Для наглядности на рис. 1.2,-а изображена механическая упругая внутренняя связь,-образованная катарактом 10 и пружиной и. При перемещении двигателем 7 вентиля 8 рычаг 12 перемещает цилиндр катаракта 10, а вместе с ним и поршень. Благодаря этому движок 9 потенциометра изменяет соотношение между сопротивлениями, включенными в плечи моста, и на обмотку чувствительного реле 4 будет подан дополнительный корректирующий сигнал. С течением времени пружина И, воздействуя на поршень, возвращает его, а вместе с ним и движок 9 в прежнее положение. При этом масло из одной полости цилиндра через перепускной клапан 13 перетекает в другую полость цилиндра. Таким образом, по окончании процесса регулирования равновесие мо- ста всегда будет соответствовать заданному значению регулируемой величины, устанавливаемому задатчиком 5. Упругая внутренняя связь характеризуется двумя величинами: постоянной времени Гу, зависящей от параметров катаракта и пружины, и коэффициентом усиления р, зависящим от соотношения плеч рычага 12. Если З'агрыть перепускной клапан 13, то поршень и цилиндр катаракта будут жестко связаны, и мы получим жесткую внутреннюю связь. При этом можно катаракт и пружину убрать, а рычаг 12 соединить непосредственно с движком 9, как это показано на рис. 1.2,6. В этом случае по окончании процесса регулирования равновесие моста уже не будет соответствовать заданному значению регулируемой величины, а будет отличаться от нее, так как каждому положению регулирующего вентиля соответствует определенное положение движка 9. Жесткую внутреннюю связь можно рассматривать как частный случай упругой внутренней связи при Ту = оо. Как видно из рис. 1.2, а и б, упругая и жесткая внутренние связи охватывают релейный элемент и двигатель. В релейных системах автоматического регулирования температуры обычно применяется не механическая упругая внутренняя связь, а электрическая, или электротермическая замедленные связи, которые по своему действию эквивалентны упругой внутренней связи. 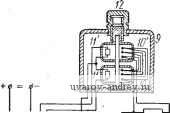 Пар 2 Г Рис. 1.3. Система автоматического регулирования гемпературы с замедленной внутренней связью. Схема системы регулирования температуры пара в теплообменнике с замедленной внутренней связью приведена на рис. 1.3. Температура пара измеряется термопарой 3, включенной последовательно с обмоткой чувствительного поляризованного реле 4 в диагональ моста 2. При разбалансе моста реле, замыкая контакт 6 или 6, включает ту или иную обмотку реверсивного дви ателя 7; двигатель перемещает вентиль 8, который регулирует подачу йоды (охлаждающей пар) в теплообменник /. Замедленная внутренняя связь осуществляется включенными навстречу друг другу двумя группами термопар 10 и 10, которые подогреваются Электронагревателями И и И'. Эти электронагреватели начинаю^ нагреваться одновременно со включением двигателя, причем включение того или иного электронагревателя зависит от направления вращения двигателя. Возникающая при этом э.д. с. соответствующей группы термопар вычитается из э.д.с. измерительной термопары на потенциометре 13. Следовательно, поляризованное реле срабатывает в зависимости от разности основного сигнала и сигнала обратной связи. Коэффициент усиления замедленй'ой внутренней связи может быть изменен установкой дйижка потенциометра 13, а постоянная времени Гз - поворотом винта 12, изменяющего расстояние между термопарами. В отличие от упругой внутренней связи, замедленная внутренняя связь охватывает релейный элемент и не охватывает двигатель. Однако по своему действию упругая и замедленная внутренние связи эквивалентны друг другу. Схема электронного регулятора ВТЙ*), который применяется не только для регулирования температуры, но и (при изменении типа датчиков) для регулирования иных величин (давления, уровня, расхода и т. д.), изображена на рис. 1.4. Эта схема регулятора имеет в качестве измерительного устройства термопару /, включенную так, чтобы при равенстве температуры заданному значению, устанавливаемому задатчиком 2, э.д.с. ее компенсировалась падением напряжения на сопротивлении 3, создаваемым сухим элементом 4. При отклонении температуры от заданного значения возникающее напряжение разбаланса подается на вход магнитного усилителя напряжения 5. Магнитный усилитель наряду с усилением производит преобразование этого постоянного напряжения в переменное, амплитуда и фаза которого зависят от величины и знака входного напряжения. Переменное напряжение подается на сетку левого триода Лу. Усиленное напряжение, снимаемое с анодной нагрузки, подается на сетку левого триода Л2 оконечного каскада, работающего по так называемой схеме баланса токов . Увеличение тока левого триода Л2 вызывает уменьшение тока правого триода Л^. Разность этих токов питает одну из обмоток 6 трехпозиционного поляризованного реле 7, вторая обмотка 8 которого играет роль удерживающей. Это реле, в зависимости от знака разбаланса, замыкает тот или иной контакт 9-9, управляющий магнитным пускателем, который переключает соответствующим образом цепь трехфаз- *) См. В. Д. Миронов [2], В, Д. Миронов. Е. П. Стефани [1], Б. Д. Комаровский [1]. 1 2 3 4 ... 57 |
||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |