


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 4 5 6 7 8 9 10 ... 44 Программное управление работой ФБ осуществляется путем передачи в ФБ командных сообщений об изменении режимов их работы, пределов измерения, о выполнении ими определенных функций и т. п. Имеются коды таких сообщений, рекомендованные для преимущественного применения в приборном ИФ. Максимальное количество их равно 128. Идентификация кодов и выполнение предписанных ими операций производятся в ФБ аппаратным способом. Для использования в приборном ИФ рекомендуется 7-битный код по ГОСТ 13052-74. Магистраль
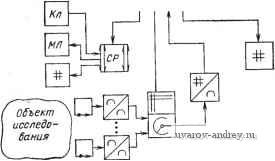 Рис. 5.8. Система с объединением ФБ с помощью приборного ИФ Характеристики линий связи и разъемов в приборном ИФ регламентируются. Выпускаются соединительные линии (кабель с 24 жилами, 150 пФ/м) длиной 1, 2 или 4 м. Суммарная длина кабелей ко всем ФБ не должна превышать 20 м. При применении специальных устройств, обеспечивающих изменение вида модуляции передаваемых сигналов, имеется возможность обмена данными между ФБ, расположенными до 1000 м друг от друга. Максимальная скорость передачи информации при применении приборного ИФ - 1 Мбайт/с при длине соединительных линий до 5 м и 250-300 кбайт/с при длине соединительных линий до 20 м и объединении пяти ФБ в системе. Известно большое количество разнообразных систем, основанных на использовании приборного ИФ и объединяющих разнотипные ФБ. Приведем структурную схему простейшей локальной ИБС (рис. 5.8), состоящей из микро-ЭВМ, работающей с периферийными устройствами (накопитель на магнитной ленте МЛ, клавиатура Кл для ввода информации и цифропечатающее устройство), быстродействующего цифропечатающего устройства, коммутатора аналоговых сигналов с циклическим и адресным управлением, цифрового измерительного устройства. Микро-ЭВМ CP в системе не только обрабатывает информацию, поступающую от объекта исследований, но и управляет работой системы. Интерфейсные устройства сопряжения ФБ с магистралью приборного ИФ объединены в единый блок. Зарубежными фирмами выпускается относительно большое количество различных устройств, основанных на использовании приборного ИФ, а также ФБ с соответствующими устройствами сопряжения. К ним относятся измерительные системы для измерений напряжений, спектроанализаторы, цифровые дисплеи, генераторы сигналов и т. п. Заметим, однако, что эта продукция (по количеству наименований) в фирме HP занимает 10-20%. По сравнению с последовательным приборный ИФ позволяет получать существенно большую скорость обмена информацией благодаря одновременной передаче как обозначения, так и содержания данных, адресной и командной информации, а также передаче информации по байтам. В то же время использование асинхронного обмена информацией позволяет объединять ФБ, имеющие различное быстродействие. 5.5. ИНТЕРФЕЙС КАМАК Общие положения Система КАМАК (САМАС - Computer Applications for Measurement and Control) рекомендована к использованию Международной электротехнической комиссией. Она разрабатывалась примерно с начала 1960-х годов под руководством Комитета ESONE Евратома , объединившего для этой цели усилия около трех десятков научно-исследовательских учреждений ядерной физики. Совершенствование ИФ системы КАМАК непрерывно продолжается: в течение нескольких лет кроме начального основного варианта появились ИФ быстрого КАМАК, последовательного КАМАК, КАМАК с микропроцессорными контроллерами и узлами сопряжения. Далее рассматривается ИФ КАМАК, соответствующий ГОСТ 26.201-80 [5.5]. Кроме того, описывается магистраль ветви и последовательная магистраль КАМАК- По принятой классификации (см. табл. 5.1) ИФ КАМАК предусматривает: возможность построения систем с двумя и более уровнями цежгрализации (Аб); раздельные системы шин для информационных и управляющих потоков (Бб); магистральную систему шин, работающую совместно с несколькими радиальными шинами, связывающими все ФБ с ФБУ [Ва.б); параллельный порядок выполнения операций обмена информацией (-Г6); объединение активных ФБПИ {Да,б); синхронный обмен информацией {Еа); работу с любой ЭВМ {Жа); унификацию конструкции (За); унификацию питания (Иа). Первая ступень централизации управления и обработки информации обеспечивается в крейте, а вторая - в ветви, которая может объединять до семи крейтов. Возможно объединение для совместной работы нескольких ветвей. Описание магистрали крейта Конструктивно крейт объединяет 25 станций, ширина каждой из которых равна 17,2 мм (0,7 дюйма). Высота крейта равна 200,9 мм, а глубина - 293 мм. Две правые станции в крейте заняты ФБУ - контроллером крейта. В остальных 23 станциях размещаются ФБПИ. Функциональные блоки могут занимать 1, 2, 3, 4, 6 или 8 станций: Каждый ФБ должен содержать интерфейсный узел сопряжения. Расположение ФБ в крейте может быть любым. Адрес каждого ФБ соответствует месту его расположения в крейте. Связь с ЭВМ может быть выполнена через контроллер крейта (КК); микропроцессоры и микро-ЭВМ могут быть присоединены в качестве ФБ. Система шин и основные служебные сигналы крейта выглядят следующим образом. Шины адреса и команд. К каждой станции от КК проводится индивидуальная (радиальная) линия, обозначенная на рис. 5.9 буквой N (Number - номер). Внутри ФБ могут быть расположены адресуемые субблоки. Для этой цели выделены четыре магистральные шины Ai, Аг, А4, As (Subaddress - суб адрес). Код операции, которая должна быть выполнена в ФБ, передается по пяти магистральным шинам: Fi, F2, F4, Fs, Fie (Function - функция). В ИФ установлено 18 типовых функций: F(0)-чтение регистра, F(8) - проверка запроса, F(24)-запрет и т. п. Типовое обращение к ФБ образуется в виде комбинации сигналов NAF: Ас1*{ФБ)\\5ЬАс1*\\Ф*. .. , N 1 Крейт 7 t2 B;+gB;-gB;- B (+г00В;-ИгЪ;-12В,-117Ъ) щщ: Земля. Резерд Pj, -сквозные шины PjyPif, %-индиШуапьные шины .nycK-<f*(z); z.3anpem-y*yl,; J.CEpac-<p(cJ .занято-(р*(<р) г.ОтВет-р^ЮЗ.Команда приита-С^) Запрос (срлаг) Чтение R1,...,RZf Строд-тгшпи:51,отсче1л-Ф'П)\$,1шиь1е могут шнеттьс1НПГг F,Fг.F,,Fв,F6- Ф Крей.71 06ш,ее упрадпение Данные Строб- сигналы Адресован- ная команда е ti е ФБУ а 1Й Bepmu--капьная магистраль Контроллер (драйее)&етеи Рис. 5.9. Магистрали крейта и ветви КАМАК Информационные шины. В ИФ крейта выделены однонаправленные 24 магистральные линии сигналов, обозначаемые Wi,... -..-,W24 (Write - запись) для записи (приема) информации и Rl,...,R24 (Read - чтение) для чтения (выдачи) информации. Шины статуса (состояния). От каждой станции к КК проводится индивидуальная шина, по которой от ФБ может передаваться сигнал запроса (флаг) ф*(RW). После NAF передаются сигналы о занятости магистрали Ф*(Ф), о состоянии выбранной части ФБф(С) и о принятии команды ф(Ф*)- Шины синхронизирующих импульсов. По магистральной линии S1 передается синхроимпульс (строб 1) Ф (Т^) при неизменных сигналах на шинах R и W, по линии S2 (строб 2) Ф(72) передается синхроимпульс при последующем изменении сигналов на шинах R и W (например, перед сбросом показаний регистров). Шины общего управления. По магистральной шине Z (zero - нуль) в сопровождении сигналов Tz и ф(Ф) передается сигнал пуска, по шине I (Inhibit)-ф*(/)-сигнал запрета выполнения команды, по шине С (Clear - очистка)-ф*(С)-сигнал сброса, очистки магистрали. Шины питания магистральные: -Ь24 В, -24 В, -1-6 В (25 А), -6 В (25 А), две шины заземления. Кроме того, в качестве дополнительных могут быть использованы магистральные шины для питания ФБ от источников -1-200, -Ь12, -12, 117 В, две шины для заземления. Шины для нестандартных соединений: Pi-Ps. Всего система шин крейта содержит 82 магистральные линии сигналов, проходящих через все станции, и по 2 индивидуальные (радиальные) линии, идущие от контроллера крейта к каждой станции. Таким образом, в крейте используется смешанная магист-ально-радиальная (коллективная и индивидуальная) систему шин. В ИФ КАМАК унифицированы 86-контактные разъемы и соединение всех шин с контактами разъемов. Для детального изучения ИФ КАМАК необходимо обратиться к соответствующим источникам [5.5]. Здесь же рассмотрим лишь основные особенности функционирования магистрали крейта. В операциях обмена информацией на магистрали крейта участвуют, как правило, контроллер крейта и ФБИ или ФБП. Схема передачи сигналов команды от контроллера крейта к ФБ изображена на рис. 5.10. Команда NAF записывается в регистры контроллера. Из регистра N адрес ФБ в параллельном коде подается на дешифратор, преобразующий этот код в сигнал Ad- на индивидуальной линии, имеющей соответствующий номер (от 1 до 24). Заметим, что при 5-разрядном двоичном коде адреса на выходе дешифратора остаются избыточные линии (от 25 до 32), которые могут быть использованы ( ложные адреса ) для других целей. Сигнал адреса (вызова) из дешифратора по индивидуальной шине поступает на соответствующий ФБ. Сигналы субадреса SbAd* по шине А и кода операций Ф* по шине F передаются по магистральным шинам в ФБ, где производится их дешифрация. На рис. 5.10 показан путь прохождения сигналов команды записи в регистр 1-й группы Fie, относящейся к пятому субблоку ФБ. Сигнал ответа q>* {Q) по шине Q вырабатывается после декодирования команды. Если эта команда связана с обменом информацией (R или W), то этот сигнал должен формироваться до сигнала Ti. RG N RG А RG F -Alt -3 seAd
n 18 1 ACS) FfW) Запись В регистр 1-й группы i?{16)] 5-го субблока, S0B Рис. 5.10. Схема передачи сигналов команды в крейте КАМАК Сигнал пуска по линии ф*(г) имеет абсолютный приоритет, по нему схема устанавливается в исходное состояние. По сигналу сброса ф*(С) начальное состояние устанавливается для части системы. Сигнал запрета ф*(/) может запрещать работу блока или его части. Сигнал запроса ф*(К|\У) сбрасывается после выполнения вызванной им команды при наличии сигнала специальной команды F(10) (сброс запроса) или при наличии в системе сигнала ф*(2). В интерфейсных устройствах сопряжения ФБ имеется две группы регистров - регистры данных и регистры фиксации сигналов управления. В адресном режиме (ФБУ - ФБИ) выполняется следующий порядок обмена: {Ad* ФБИ|5Мй*1Ф*] [1и(/*) 1!ф*и(Н)] X X[Ф*о (Г,) illo(W: Р) ] [Ф*о (Г2) Щи(/*) ]. Полный цикл передачи 24 бит равен 1 мкс. Следовательно, имеется возможность передачи информации по шинам R и W со скоростью 24-108 бит/с. Если внутри ФБ имеется несколько субблоков, могущих выдать или принять информаЧцио (например, несколько АЦП или коммутационных элементов), и один из субблоков ьыдал сигнал запроса (флаг) ф*(Н{Ш), то для нахождения адреса этого субблока контроллер крейта выполняет последовательный опрос &zex субадресов А. Затем, только после нахождения субблока, выдавшего сигнал запроса, дается сигнал разрешения и производится операция связи этого субблока с шинами R или W. Указанная особенность обмена информацией по инициативе субблока приводит к увеличению времени, затрачиваемого на процедуру обмена информацией в этом случае. Описание магистрали ветви В ИФ КАМАК предусмотрена организация второго уровня централизации управления обменом информации, который носит название ветви (branch) или вертикальной магистрали. В магистрали ветви возможно объединение до семи крейтов. Система шин и основные служебные сигналы ветви имеют следующие характеристики (см. рис. 5.9). Шины адреса и команд. По радиальным шинам BAd*{l) - Б Ad* (7) к каждому крейту передаются сигналы, определяющие его адрес. Для передачи номера модуля в крейте используются пять магистральных линий BNi, BN2, BN4, BNs, BNie и четыре магистральные линии субадреса BAi, ВА2, ВА4, BAg. Для передачи кода операции (функции), которую должен выполнить адресованный субблок, используются 5 магистральных линий BFi, BF2, BF4, BFg, BF,6. Таким образом, в ветви радиальными шипами связаны контроллеры крейтов и ветви (КК и KB), субадреса и команды передаются в двоичном коде за один такт по магистральным шинам. Информационные шины. Для записи и чтения информации используются 24 магистральные линии BRWi,..., BRW24. Шины статуса (состояния). Запросы на обслуживание со стороны КК передаются по радиальным линиям Bф*l(WR), ... ...Вф*7 (WR). Сигналы Вф*(2), Вф*(/), Вф*(С), Вф*(Ф), Вф* (Q) аналогичны сигналам общего управления магистрали крейта. Резервные магистральные шины: [Вф(Ф')],..., Вф(Ф*)9]. Остановимся на особенностях работы магистрали ветви. Магистраль ветви работает в асинхронном режиме. Дополнительные неадресуемые команды могут быть получены путем использования мнимых адресов (от 24 до 32). При запросе обслуживания от КК по линии Bф*(WR) KB дает команду на считывание кода модуля, пославшего запрос. Код моля, пославшего запрос на обслуживание, передается по шинам BRW. Стандарт не определяет, как использовать при этом шину BRW. Здесь имеется возможность, например, ;при количестве фБ, равном или меньшем 24, сохранить линию за каждым ФБ или, положим, 7 разрядов использовать для нумерации крейтов, а 17 - для нумерации модуля в крейте. Данные поступают в КБ и обратно по BRW в виде .24-разрядных слов при наличии сигнала лр* (Q). ..... .: . Максимальная длина- магистрали, ветви (при согласовании линий, наличии на линиях оконечных устройств, уменьшающих эффекты отражения волн), порядка 25 м. Имеются комплексы; вьшолненные по. трехступенчатой- иерархической структуре. В них третья.. ступень служит для объединения нескольких ветвей. - . Последовательная магистраль передачи данных При значительных расстояниях между ЭВМ и объектами (до сотни километров) в К.АМАК может быть использована последовательная петлевая магистраль передачи данных, в которой используется однонаправленная передача данных. Очевидно, -что петлевая структура магистрали обеспечивает повышенную; надёжность работы системы. Имеется описание последовательного интерфейса, позволяющего объединить в системе до 62 крейтов (рис. 5.11). Каждый крейт должен иметь контроллер, рассчитанный на работу в последовательном режиме обмена информацией (SCC - Serial Crate Controller), а управление работой крейтов осуществляется С помощью блока управления Крейт Z Крейт 1 Крейт Б2 Бпок управления последовательной магистралью Рис. 5.11. Последовательная магистраль КАМАК последовательной магистралью. В функции типового блока управления последовательной магистралью входят переупаковка сигналов, связь с ЭВМ, идентификация заявок, промежуточное хранение и др. Контроллер SCC обнаруживает адресованную ему информацию и выдает ответ - код исполнения и состояния. В последовательной магистрали используется асинхронный принцип передачи данных. Скорость передачи цифровой информации определяется протяженностью и типом линии связи: для скрученного и экранированного провода длиной 50 м - до 5 Мбит/с, 5 км - до 100 кбит/с. Информация передается по байтам (7 бит-информация, 1 бит-контроль четности) с сигналами начала и конца байта. , Каждое сообщение начинается с адресного байта (адресуется пр 62 крейтов). Последний байт сообщения содержит контрольную сумму переданных байтов. По магистрали могут передаваться 32 стандартные команды (функции). Сигнал заявки (флаг) длиной 3 байта генерируется КК по сигналу от ФБ, что позволяет идентифицировать крейт, блок и субблок. -Заявки поступают в блок управления магистралью, а оттуда-в систему приоритетных прерываний ЭВМ. Считается, что такая организация работы более быстродействующая по сравнению с непрерывным опросом- источников информации. Для защиты от помех используются экранирование, заземление согласование характеристик линий связи, а также контроль по четности и повторение передачи кодов. При обнаружении ошибки команда не выполняется, и об этом сообщается в ЭВМ. При повторном искажении команды формируется сигнал тревоги. В последовательной магистрали могут быть использованы коаксиальные кабели, кабели парной скрутки с двойной экранировкой, усилители и формирователи сигналов с дифференциальными входами и выходами. Особенности использования ИФ КАМАК Разработчики КАМАК не приводят экономических обоснований создания и использования системы, ограничиваясь качественной оценкой его достоинств и недостатков. К бесспорным достоинствам ИФ КАМАК можно отнести модульную структуру, приспособленную к гибкому построению и относительно несложному изменению состава системы, к широкой кооперации в производстве ФБ и устройств ИФ, высокую пропускную способность, строго формализованную организацию обмена информацией. В то же время следует отметить относительно высокую стоимость ФБ и конструкций, определяемую техническими данными которые избыточны для наиболее часто встречающихся на-практике задач, технологические трудности в изготовлении плат и разъемов (в крейте должно работать около 2000 контактов!) требование согласования разрядной сетки ИФ КАМАК с разрядностью АЦП, мини- и микро-ЭВМ, микропроцессоров, отсутствие закрепленных адресов за ФБ и т. п. В настоящее время разнообразные ФБ, контроллеры крейтов и ветви, линии связи, интерфейсные узлы и конструкции выпускаются многими фирмами в различных странах, в том числе и в странах - участниках СЭВ (СССР, Польша и др.). С использованием этих устройств для проведения научных экспериментов и испытаний создано довольно большое количество действующих систем. Однако имеются случаи неоправданного применения стандарта КАМАК для создания относительно простых и медленно действующих устройств, где можно успешно использовать, например, приборный ИФ. Неоднократно производились попытки исправить и упростить КАМАК. Так, например, известны работы, направленные на перевод конструктивов в метрические меры, на упрощение ИФ. Однако все они не имели серьезного успеха. Это объясняет- ся, в первую очередь, тем, что при принятии этих изменений ста---новится невозможной кооперация изготовителей ФБ при создании ИИС. В заключение следует отметить, что ИФ КАМАК является по существу объединением нескольких ИФ, позволяющим решать многочисленные запросы практики при создании новых ИИС. Однако в ряде случаев оказывается целесообразным создавать системы, части которых выполняются на ИФ КАМАК и приборном ИФ. 5.6. ИНТЕРФЕЙСЫ ПЕРИФЕРИЙНОЙ ЧАСТИ ЭВМ Общие положения Знание ИФ периферийной части ЭВМ (включая микропроцессоры) необходимо, во-первых, для сопряжения ЭВМ с остальными блоками ИИС, а во-вторых, для создания на базе этих ИФ конкретных ИИС. Далее рассматриваются ИФ периферийной части ЕС ЭВМ, См ЭВМ и микропроцессорных наборов. Следует отметить, что в периферийной части ЭВМ используются интерфейсы, в наибольшей мере учитывающие особенности данной машины. При этом автономная работа периферийных устройств, объединенных машинными интерфейсами, не предусматривается. В интерфейсах ЭВМ преимущественно используется магистральный принцип построения с программным управлением процессом обмена. Последнее приводит к относительно большому объему соответствующего программного обеспечения. В настоящее время наблюдается тенденция к унификации машинных интерфейсов для всех ЭВМ, входящих в ЕС ЭВМ, используется один интерфейс и для СМ ЭВМ. Нужно заметить, что эти ИФ относительно близки друг к другу и сопряжение между ними относительно несложно, близко и программное обеспечение этих интерфейсов Интерфейс ввода-вывода информации в ЕС ЭВМ Интерфейс устройств ввода и вывода информации в ЕС ЭВМ является стандартным для всех машин и внешних устройств, используемых с ними. Устройство, обеспечивающее совместную работу внешних устройств (ВУ) с центральным процессором и памятью ЭВМ, называется каналом ввода-вывода (КВВ) [5.7J. Канал ввода-вывода определяет направление обмена информацией (прием команд от центрального процессора, адресацию ВУ), производит выборку командного слова из памяти, выполнение действий в соответствии с командным словом канала, проверку данных на четность, прием и обработку информации о состоянии ВУ, формирование запросов на прерывание и т. п. Мультиплексный КВВ обеспечивает обмен информацией с ВУ, работающими со скоростью порядка 10 байт/с. К таким Рис. 5.12. ЕС ЭВМ Интерфейс ввода-вывода
ВУ относятся, например, ВУ для считывания информации с перфокарт - 500 карт/мин (670-1340 байт/с) ВУ-для записи на перфоленту 150 строк/с, цифропечатающие ВУ -10-50 байт/с. Для обслуживания столь разнообразных по быстродействию ВУ используется асинхронный режим обмена информацией; интервалы обслуживания определяются запросами ВУ. Канал ввода-вывода может обслуживать запрос примерно за 30 мкс, следовательно, в мультиплексном режиме КВВ может обеспечить до 30 тыс. запросов в секунду. В монопольном режиме мультиплексного КВВ какое-то одно ВУ монополизирует оборудование КВВ и оперативной памяти или центрального процессора. Скорость обмена информацией в этом случае достигает 200 кбайт/с. Мультиплексный КВВ имеет несколько подканалов. Первые восемь подканалов являются раздельными, предназначенными для управления группой ВУ (до 16 ВУ), остальные подканалы - неразделенные. Количество подканалов определяется объемом внутренней памяти ЭВМ и принятой системой адресации. Селекторный КВВ или канал прямого доступа в память обслуживает одно высокоскоростное ВУ (например, накопитель на магнитных дисках). Система шин и сигналов интерфейса КВВ ЕС ЭВМ, а также составляющих логической схемы алгоритмов представлена на рис. 5.12. Этот ИФ предназначен для обмена информацией между КВВ ЭВМ (ФБУ) и внешними устройствами (ФБ) - абонентами. Линии, по которым передается информация от КВВ к абонентам обозначается буквой К, от абонента к КВВ - буквой Л. В СЛСА сигналы, предназначенные для передачи информации от КВВ к абонентам, сопровождаются индексом К, а от абонентов к КВВ - Л. В качестве абонента (ФБ) может быть одно ВУ или устройство, управляющее группой ВУ. Ко всем магистральным линиям /С и Л подключаются все ФБ. Шина ШИН К предназначена для передачи от ФБУ данных, адресов и команд, которые должны выполнить ФБ. Сигналы по линиям АДР-К, ИНФ-К, УПР-К определяют вид информации, передаваемой по ШИН-К (Ас1к, 1к, Фк)- 1 ... 4 5 6 7 8 9 10 ... 44 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |