


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 34 35 36 37 38 39 40 ... 44 свои равномерные интервалы дискретизации. Выделение участков x{t) может быть произведено по интервалам времени Г/ или по достижении x(t) заранее установленных значений. Примеры x{t), для которых возможно применение кусочно-равномерного квантования, могут быть найдены при исследовании процессов, имеющих участки переходных и установившихся значений (например, взлет, горизонтальный полет и посадка самолета; включение, установившаяся работа и выключение радиоэлектронной аппаратуры). Использование кусочно-равномерного квантования по времени в ряде
xit) Рис. 21.8. Кусочно-равномерное программное квантование по времени Рйс. 21.9. Схема устройства сжатия информации хС]Щ 6Л' 1- случаев может дать ощутимый эффект сжатия при простом аппаратурном оформлении. Так, например, если (рис. 21.8) А^1=А/з, Д^2=10А^1, Ti=Tz, T2=8Tt, то /С=кЗ,6. Однако при кусочно-равномерном квантовании не учитываются особенности поведения исходной величины внутри участков, что часто не позволяет добиться более полного сжатия информации. Когда априорной информации об исходной функции недостаточно для выполнения операций дискретизации с заранее определенным неравномерным интервалом (а это типично для процесса измерения), то применяется адаптивная дискретизация. Суть адаптивной дискретизации заключается в том, что выборка дискрет производится таким образом, чтобы при заданной погрешности аппроксимации по этим дискретам было возможно восстановление исходной функции с помощью заданной аппроксимирующей функции. Для многоточечных измерительных систем целесообразно использование сжимателей информации, производящих равномерную дискретизацию функции и последующую выборку неизбыточных дискрет. В таких сжимателях упрощается операция датирования узлов аппроксимации, так как каждая из дискрет отделена от другой целым числом интервалов дискретизации. Функциональная схема таких сжимателей (рис. 21.9) содержит равномерный квантователь 1 и 2, устройство памяти 3, восстанавливающее устройство 4,. устройство 5, формирующее зону заданной допустимой погрешности, устройства сравнения 6, управления 7 и выдачи координаты дискреты 8. Восстанавливающее устройство восстанавливает значение исходной функции по выбранным дискретам, в, с.о.ответствии с задан- ным алгоритмом, а устройство сравнения оценивает соответствие текущего и восстановленного значений исходной функции с заданной погрешностью восстановления. Когда это соответствие нарушено, то устройство сравнения выдает сигнал на выделение x{jAt) и времени /Д/. Возможен цифровой вариант реализации сжимателя информации. В этом случае после квантователя должен быть расположен аналого-цифровой преобразователь, а остальные блоки должны работать с кодоимпульсными сигналами. В телеметрии для вое-
+£.  X(t) +£. -Е
1-1 Рис. 21.10. Аппроксимация многочленом нулевой степени при адаптивном квантовании по времени: а -с фиксированной апертурой и неизбыточной выборкой; 6-с плавающей апертурой; в - с плавающей апертурой и исправлением по предсказанному значению становления исходной функции наиболее часто используются степенные многочлены нулевой и первой степени с оценкой верности воспроизведения по наибольшему отклонению. Остановимся на особенностях дискретизации при этих условиях. Если степень аппроксимирующего полинома п=0, то возможен следующий алгоритм работы сжимателя (рис. 21.10,а): ф (В) L ф (/: = / +1) {П^ №111 (/-.П X X I(Ах: = К- - -.1) i(PR:\Lx\, в) X X (A>s)V(W:D/, x:-,) [I(S:x,) iT(a:, ,)] X Х (; = п)Ф(Е). Здесь существенные дискреты Xi. имеют индекс t. Этот алгоритм называется алгоритмом нулевого приближения с фиксированной зоной погрешности (апертурой) и неизбыточной выборкой. Второй алгоритм отличается от первого тем, что при его использовании устанавливается зона погрешности относительно каждого, в том числе и избыточного, значения измеряемой величины, и если разность между предыдущей и текущей дискретами превышает заданное значение, то выдается дискрета, предшествующая текущей. Этот случай представлен на рис. 21.10,6. На этом рисунке за зону Xj+i+e вышла дискрета Xj-i. Следовательно, выделяется узел аппроксимации Xj+\, tj+\. Третий алгоритм отличается от второго тем, что в нем исправляется значение выдаваемой дискреты -оно принимается равным предсказанному значению предыдущей выборки (рис. 21.10,в). Как и на предыдущем рисунке, за зону Xj+i+e вышла дискрета Х}+2, выделяется же узел аппроксимации Xj, t-j+i. На рис. 21.10 пунктирными линиями показаны предсказанные значения величины в последующий интервал квантования, сплошными линиями - интерполирующая кривая, знаком * отмечены выделяемые дискреты. На рис. 21.10,6, в значение предыдущей выделенной дискреты соединяется прямой линией со значением последующей выделенной дискреты на интервале квантования, следующем за предыдущей выделенной дискретой. Это позволяет уменьшить погрешность приближения. Аналогичные алгоритмы можно получить для дискретизации при применении многочлена первого порядка. Для построения зоны допустимых погрешностей в этом случае необходимо запоминать значения двух дискрет и формировать (предсказывать) зону допустимых погрешностей для последующих интервалов квантования. Зона допустимых погрешностей может быть образована двумя линиями, проходящими через неизбыточные дискреты Xj-f-e, Xj+k+e и Xj-е, Xj+k-e, k=\,2, ... Эта зона может быть переменной (веерной), устанавливаемой при появлении каждой избыточной дискреты с помощью линий, проходящих через предыдущую неизбыточную дискрету и значение последующей избыточной дискреты ±е (рис. 21.11). При ВЫ делении следующей неизбыточной дискреты построение для допустимых погрешностей производится от нее. В качестве неизбыточной выделяется дискрета, предшествующая дискрете, вышедшей за зону допустимых погрешностей. В [17.7] приводится сравнение перечисленных алгоритмов сжатия. По повышенному быстродействию, небольшому количеству ячеек памяти и логических элементов бесспорное преимущество
Рис. 21.11. Аппроксимация многочленом первой степени прн адаптивной дискретизации имеет алгоритм нулевого приближения с фиксированной зоной допустимых погрешностей и выборкой неизбыточных дис^грет. Он однако, несколько уступает по коэффициентам сжатия алгоритмам с нулевым и первым приближениями и переменной зоной допустимых погрешностей. До сих пор рассматривались так называемые прогнозирующие (экстраполирующие) алгоритмы. Для сжатия информации могут быть использованы и интерполирующие алгоритмы. В- них зоны допустимых погрешностей устанавливаются по значениям дискрет, удаленных на два и более интервала квантования, а выделение неизбыточных дискрет производится внутри этого участка. Погрешности аппроксимации могут определяться по среднему квадратическому критерию, тогда в алгоритм квантования должен входить оператор вычисления текущей средней квадратической погрешности аппроксимации. Естественно, что при адаптивном квантовании по времени в--качестве приближающих могут быть использованы любые из известных многочленов. Нужно отметить, что методы аппроксимации ортогональными многочленами с коэффициентами Фурье в-, определенном смысле обладают повышенной помехоустойчивостью, поскольку в них используется интегрирование исходной функции. Повышенным коэффициентом сжатия по сравнению с однопараметрическои адаптацией обладает двухпараметрическая адаптация, позволяющая в зависимости от поведения измеряемой величины определять интервал аппроксимации и степень аппроксимирующего полинома. Сжатие измерительной информации может также производиться путем устранения некоторых коэффициентов аппроксимирующего многочлена, полученных расчетным или аппаратурным путем. Так, например, при разложении с помощью функций Уолша измеряемой величины, близкой к синусоидальной, при погрешности восстановления порядка 4-10- удалось вместо выдачи 64 отсчетов дискретных значений ограничиться получением 20 коэффициентов-Фурье- Уолша. Работы по адаптивной дискретизации непрерывных величин весьма интенсивно развиваются, и можно ожидать, что в ближайшее время многие быстродействующие измерительные устройства, предназначенные для получения большого количества результатов измерений, будут комплексироваться с устройствами для сжатия информации или адаптивно выполнять операции измерения. 21.3. ОЦЕНКА ВРЕМЕНИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАНИИ АНАЛОГОВОЙ ЧАСТИ Большинство ИИС содержит функциональные узлы, выполняющие операции над аналоговыми (непрерывными и дискретными) и кодоимпульсными сигналами. Для анализа быстродействия аналоговой и цифровой частей систем могут быть успешно применены разработанные в теории электрических цепей и автоматического управления методы решения дифференциальных уравнений или уравнений в конечных разностях, описывающих работу функциональных узлов и всей системы в целом. Литературы, в том числе-учебной [21.4], по этому материалу много. Применительно к ИИС задачи анализа быстродействия аналоговой части наиболее полно рассмотрены в [21.5]. При системотехническом проектировании ИИС во многих случаях нет необходимости получения полного описания поведения си- схемы во времени, а достаточно знать интервал времени, в течение которого может быть выполнено измерение с погрешностью, не превышающей заданного значения. Такая постановка вопроса относится главным образом к разомкнутым системам с апериодическими переходными режимами или с режимами, в которых колебательные составляющие затухают столь быстро, что их влиянием можно пренебречь. Именно особенности расчета времени измерения таких систем рассмотрены в этой главе. К основным аналоговым звеньям, существенно влияющим на время преобразования всей аналоговой части ИИС, в первую оче редь относятся датчики [7.2, 21.6]. Динамические режимы большинства датчиков описываются дифференциальными уравнениями первого и второго порядка с постоянными коэффициентами. Остановимся на температурных датчиках. Если динамический регулярный режим таких датчиков при скачкообразном изменении температуры среды (от О до бо) описывается уравнением Tde{t)/di-i-e{t)-Qo, а передаточная функция такого апериодического (инерционного) звена =1/(Ts+l), то решение этого уравнения е(О=0о(1-е-*/). Здесь Т - постоянная времени датчика, ©(О-его температура, а бо - температура среды, s - оператор Лапласа. Время, по прошествии которого бо-б(О^Д0, будет равно At= =Пп(1/Ае). Постоянная времени датчика Т является функцией его теплоемкости, коэффициента теплопередачи, геометрических размеров и т. п. При t=T е-*/г=0,368, и, следовательно, 6(Г)0,660 (см. приложение 2), а при 1/Де=100 =4,6 Г. Значения постоянных времени для выпускаемых промышленностью терморезистивных датчиков находятся в пределах от десятых долей секунды до десятков секунд, термопар - от десятков секунд до нескольких минут, для радиационных, яркостных, цветовых и фотоэлектрических пирометров - порядка секунд. Имеются инфракрасные пирометры с постоянной времени порядка десятых и сотых долей секунды [21.6]. Выпускаемые промышленностью терморезисторы и термопары рассчитаны на длительную их эксплуатацию. Если условие длительной эксплуатации не накладывается, то можно изготовить термосопротивления и термопары из калиброванных тонких проволок (диаметром до 30-50 мкм) и добиться постоянных времени таких датчиков порядка 50-10- с. Если термоприемники размещены в защитной оболочке, то тогда динамический режим такого звена может описываться уравнением второй степени. В большинстве случаев режим этого звена апериодический и передаточная функция W=k/{TzS--{-TiS-{-l) = =й/(7з5+1)(Г45+1), где Т,>2Т2, Гз,4= (1/2) (Г,±]/Т,=-а решение имеет вид, k[l - {Г^е'*- Т,е- )1{Т,-\-Т,)]. Следует подчеркнуть, что динамический режим работы термо- датчиков, их постоянные времени существенно зависят от условий их использования. Заметим, что в литературе (в том числе и справочной) зачастую скупо приводятся данные о динамических характеристиках датчиков. Поэтому при необходимости получения таких данных следует применять экспериментальные методы [21.4]. Большинство дискретных датчиков относится к апериодическим инерционным звеньям. Однако имеются датчики ускорений, скоростей, давлений, углов поворота гироскопов, являющиеся колебательными звеньями второго порядка с передаточной функций W= =й/(7V-l-2g7s--l), 0<g<l, для которой решение равно k[l- -e-*/sin (W+e) IKT, где %= V\-l/T, e = arctg(Xr/g). Весьма часто именно динамические свойства датчиков являются определяющими быстродействие всей системы. Отметим, что-примерно на порядок [7.2] можно уменьшить постоянную времени цепи с термодатчиками, используя известные методы коррекции (последовательное включение корректирующих звеньев, введение обратных связей и производных от измеряемой температуры). Большой выигрыш по быстродействию может быть в ряде случаев получен при использовании в ИИС вместо большого количества дискретных датчиков (типа термопар, 1ермосопротивлений) системных датчиков, воспринимающих одновременно поле температур. Переходные процессы остальных звеньев аналоговой части ИИС - измерительных цепей (мостовых, дифференциальных и др.), усилителей, фильтров, коммутаторов, входных цепей аналого-цифровых преобразователей и т. п. - также в большинстве случаев могут быть описаны уравнениями первого или второго порядка. При системотехническом проектировании ИИС важно знать каким образом будет вести себя вся совокупность аналоговых звеньев. Для последовательного включения звеньев (рис. 21.12,а) об- т щая передаточная функция lF(s) =Хвых(5)/л::,х(5) = Д (s), для. i = \ т параллельного (рис. 21.12,6) W{s) = Wi{s) и для встречно-па- раллельного включения звеньев (отрицательная обратная связь, рис. 21.12,в) где S - комплексная переменная. Из многочисленных методов анализа линейных автоматических систем выделяется метод получения передаточных функций типовых звеньев по Лапласу, объединение их и нахождение решений (оригиналов) производится по таблицам обратных преобразований Лапласа. Для облегчения поиска нужных решений предлагается- W,(s) XBx(S) Рис. 21.12. Структурные схемы последовательного (а), параллельного (б) и параллельно-встречного соединения звеньев (в) использовать следующую методику. Во многих случаях аналоговая часть ИИС может быть представлена в виде соединения апериодических звеньев первого порядка, интегрирующих и дифференцирующих звеньев, а также звена запаздывания. В табл. 21.2 представлены передаточные функции этих звеньев и их переходные характеристики. Если имеется структурная схема аналоговой части, объединяющая указанные звенья последовательно, можно, используя приложение 2, сразу получить оригинал, минуя преобразования, необходимые для определения полного изображения и поиска оригинала по нему в обширных таблицах, содержащих большое количество изображений и оригиналов [21.4]. Положим, канал аналоговой измерительной части содержит датчик и измерительную цепь, являющиеся апериодическими инерционными звеньями, а также усилитель с фильтром и апериодическое звено второго порядка. Апериодическое звено второго порядка может быть представлено в виде последовательно соединенных апериодических инерционных звеньев Сц и a2i (см. приложение 2). Для получения переходной характеристики (табл. 21.2) этого соединения необходимо найти в табл. П.2.2 приложения 2 оригинал изображения, кодируемого как щагаа^ (здесь а^-ац, й4= =02)). Переходная характеристика для такого соединения звеньев имеет следующий вид: h{t)=--- ( 1 - I] CiTe jn /l/- Если Т,= = 1 с; Т2=0,1 с; Т„=0,5 с; T2i=0,2 с; ,fe,=fe2=/sii = fe2i = 1; Л^= = (1; 2; 11; 21); я=4; Г/ -/f] (Г, - Г,-), (Г^-Тг) (Т^-Тп) (Т^-Т ) - О,9-0,5-0,8 . - 0,28; 2,8; Таблица 21.2. Типовые звенья и их характеристики Тип звена; передаточная функция Переходная характеристика оригинал от Апериодическое (инерционное); W = TiS + l
Интегрирующее (инерционное); s{TiS+ 1)  у/У уУ /У ,(х=агс tg К Дифференцирующее (инерционное); TiS + 1 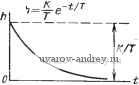 Апериодическое второго порядка; Й7 = - ----; Г^2Г„; (TsiS+l)(T s+ 1) 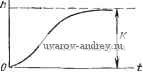 колебательное; 0<5< 1 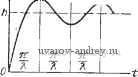 с = 4 2- Задавая допустимый по погрешности уровень преобразованного сигнала, можно определить время, необходимое для достижения этого уровня сигналом на выходе аналоговой части при подаче на ее вход ступенчатообразно изменившегося сигнала. Допустим, необходимо найти, за какое время уровень переходной характеристики h{t) станет равным 0,99: 0,99= 1 - 2,8е- +0,28е-° -f 4,2е-2- 1,7е-5 . Из приложения 3 находим, что это равенство соблюдается при г=5 (здесь все слагаемые имеют существенно меньшее значение по сравнению с первым членом). Если цепочка последовательно соединенных звеньев можетбыть разделена на две части, переходные характеристики которых имеются в табл. П.2.2, то можно использовать теорему о свертке для получения переходной характеристики всей цепи: Заметим, что существенное упрощение при вычислениях может быть получено, если исключить из переходных характеристик слагаемые, имеющие пренебрежимо малые значения. При параллельном соединении звеньев их передаточные функции и переходные характеристики суммируются. Для нахождения переходной характеристики цепи с параллельно-встречным соединением звеньев можно воспользоваться табл. П.2.3. В выражениях этой таблицы в числителе помещается код прямой цепи, а в знаменателе-код цепи обратной связи. В этих таблицах степень полинома, описывающего цепь обратной связи, ие превышает второго порядка. При сложных соединениях звеньев и необходимости получения частотных характеристик прохождения сигналов следует пользоваться методами, изложенными в руководствах [21.4]. 21.4. ОЦЕНКА ВРЕМЕНИ РАБОТЫ ЦИФРОВОЙ ЧАСТИ ИИС. ВЫБОР ЭВМ ПО БЫСТРОДЕЙСТВИЮ При наличии в ИИС аналоговой и цифровой частей анализ быстродействия системы в целом может быть произведен при выполнении следующего условия; аналого-цифровое преобразование и последующие операции над кодоимпульсными сигналами могут начинаться после того, как закончатся (с заданной точностью) переходные процессы в аналоговой части, а обратное цифро-ана- лотовое преобразование - после завершения всех цифровых операций с кодоимпульсными сигналами. Если принять это условие, то тогда цифровую часть с точки зрениявременного анализа можно считать элементом системы, вносящим запаздывание тц. В разомкнутых ИИС время получения количественной информации будет определяться суммарным временем аналоговых та и цифровых Гц преобразований. Время Тц, необходимое для выполнения цифровых преобразований, может быть определено путем анализа содержательной логической схемы алгоритмов работы данной системы. ЭВМ, входящие в состав ИИС, в большинстве случаев выполняют две основные функции: во-первых, производят вычислительные и логические процедуры, во-вторых, управляют работой функциональных блоков системы, обменом информацией между ними, процессами сбора информации от объектов исследования и выдачи информации из системы. Помимо этого ЭВМ в ИИС используются для метрологического обеспечения работы систем, в телеизмерительных системах - для защиты передачи кодоимпульсной информации от помех и т. д. Ниже рассматриваются лишь применения ЭВМ, связанные с выполнением ими основных функций. Вычислительные, логические процедуры и операции обмена цифровой информацией могут выполняться в реальном времени, т. е. за некоторую долю Тц интервала времени Atp, в течение которого состояние объекта исследования может с заданными погрешностями оставаться неизменным. Размер такого интервала определяется в процессе системотехнического проектирования. Эти процедуры могут выполняться в ряде случаев с некоторой задержкой на время Д/з>А^р; однако тогда запись в ЭВМ исходных для вычислений данных все равно должна производиться в реальном времени, а емкость памяти ЭВМ должна позволять занести туда все необходимые данные и хранить их по крайней мере в течение времени задержки. Функции управления должны вьшолн.чться только в реальном времени. При этом, естественно, время на формирование и восприятие каждого служебного сигнала должно занимать определенную, обычно меньшую часть интервала тц, которую обозначим Таким образом, при однопрограммной работе ЭВМ каждый интервал реального времени, отводимый для работы ЭВМ, входящей в состав системы, может быть разделен на часть утц, в течение которой формируются и выполняются слу;кебные сигналы, и на часть хтц, отводимую на выполнение вычислительных и логических процедур. За время хтц ЭВМ должна принять (в частности, записать в память) массив данных Qi (за время хз/Тц), произвести над ним необходимые преобразования FQi (за время хрТц) и выдать FQi (за время хшТц). Следовательно, ЭВМ должна обладать скоростями ввода и вывода информации соответственно 6i/xsiTq и 1 ... 34 35 36 37 38 39 40 ... 44 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |