


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 28 29 30 31 32 33 34 ... 44 (A o >  Ю Рис. 18.2. Компенсационные ТИС постоянного тока: а - статическое регулирование; б - астатическое регулирование; е - ТИС постоянного на- .пряжения При статическом регулировании (рис. 18.2,а) /-/,*=д/; / /Со.с/1=Д/; lKo.Ji/IM/I; kc=AI/I; /i=[(l-/Со.с) Со.с]/; A/=const. При Д/-0 теряется устойчивость. При астатическом регулировании (рис. 18.2,6) dI*/dt=K)Al; .Д/=/-/*-0. Интеграл /i*=/Cac J Aldt растет до тех пор, пока о AI не станет близким к нулю, и I=I*=Ko.Ju h=I/Ko.c- Отсюда видно, что при /Сс<1 и /Со.с>1 в компенсационных токовых ТИС можно добиться, чтобы изменение сопротивлений ЛС не оказывало существенного влияния. Однако при этом невозможно устранить влияние токов утечки. Если в уравнении /, =/(ch у/-(-(Zg/ZJ sh у/) = Л^С) использовать приближенные выражения для ch у/1-{-(уТ/2) и shy/=y/, то \У{1) [ 1 + if 1-/2) + (ZJZe) у/]. Для ш = о;- у = УЯЛ. 2с = VRJG и тогда W{l)[l-(R,Gj2)l + {r/VRo/Go)l]. При G =0 (О = 1, а при G = 1 10-= 1 /(Ом- км), Г (О 1 + (/?о/2) Ю f -f 4-(-.l/V%)/. Если принять, что (/? /2) lO-f+ (f2/T)10-/=I0-, то при Яо=20 Ом/км и токе /i, несущем полностью информацию об измеряемой величине (т. е. в отсутствие компенсационного режима) длина линии не должна превышать 45 км. Если же по ЛС протекает ток AJ=Kch или ток небаланса в .астатическом режиме, то, очевидно, его утечки скажутся в меньшей степени и длина ЛС может быть увеличена. Аналогичные рассуждения можно провести и для компенсационных ТИС постоянного напряжения (рис. 18,2е). Итак, ТИС постоянного тока просты и дешевы, в них используется унифицированный сигнал в ЛС (О-1 мА, О-5 мА) при изменении сопротивления нагрузки в довольно широких пределах (до 2 кОм), фильтрация входных сигналов осуществляется магнитно-электрическим механизмом. I Используются ТИС постоянного тока при длине ЛС в лучших случаях до десятков километров, при этом нужно учитывать, что в одноканальных токовых ТИС ЛС используется неэффективно.. Анализ переходных процессов в токовых некомпенсационных и компенсационных ТИС и рассмотрение некоторых реализаций, таких систем приведены в [17.1]. В заключение следует отметить, что токовые ТИС отличаются от аналогичных устройств ближнего измерения только тем, чтО' в них применяются ЛС с распределенными параметрами. Телеизмерительные системы с частотно-модулированными сигналами (частотные ТИС) Различаются синусоидальные частотно-модулированные (ЧМ) сигналы и сигналы с частотно-импульсной модуляцией (ЧИМ). Если при ЧМ информационным параметром является частота колебаний, то при ЧИМ - частота следования импульсов. К основным характеристикам частотных ТИС относятся коэффициент изменения частоты Kf=fmax/fmin и ширина полосы частот Af=fmax-fmin- Применяются также понятия средней частоты канала fo= = {fniax-fmin)/2 И девиации частоты Е=А /о. Коэффициент Kf выражается через е как Kf==(2--e)/(2-е). Поскольку коэффициент распространения у= Т^(о+/ о) (Go+iCJ резко зависит от частоты, то преимущественно применяются низкочастотные системы, работающие в области подтональных частот (до 300 Гц). Значение Kf желательно выбирать равным примерно 1,5 [17.1]. Уменьшение Kf может привести к большой погрешности из-за нестабильности генератора на передающей части: положим, что Ax/XmaxbJ/Af; 6f/Af=8f/(fmax-fmin) bf/fmax {I-fmin/fma.) = = {bf/frna) [Kf/(Kf-\b тогда при /Cfl,5 Kf/{Kf-\) может измениться от cx) до 3, a при /С/1,5- от 3 до 1. При Kf=\,b и А/=40 Гц 6=1/2,5, а /о=А е=100 Гц. Увеличение Kf может привести к уменьшению количества каналов, которые могут быть организованы в данном диапазоне частот. В ТИС с ЧИМ коэффициент изменения частоты может иметь несколько большее значение (примерно 4-10), так как для сохранения достаточной крутизны фронтов импульсов сигналов нужно обеспечить более широкий частотный спектр КС [17.3]. Передающая часть ТИС с ЧМ-сигналами (рис. 18.3) содержит генераторы синусоидальных колебаний, частота которых зависит от величины, которую нужно передать по КС. Такой величиной могут быть ток или напряжение, которые могут изменять активное, индуктивное или емкостное сопротивление RC- или £С-гене- раторов, усилие, действующее на струнный генератор, и т. п. Для улучшения точностных характеристик в таких генераторных преобразователях используются компенсационные режимы, обратные связи и т. п. В ТИС с ЧМ-сигналами на передающей части используются индукционные механизмы с механическими, оптическими или электрическими формирователями импульсов, мультивибраторы и бло-кинг-генераторы. На приемном конце для преобразования ЧМ- или ЧИМ-сигна-лов в ток или напряжение используются аналоговые выпрямительные и усредняющие (в виде ю Рис. 18.3. тис с ЧМ-сигналами конденсаторных частотомеров) преобразователи ЧМ-сигналов (после приведения их амплитуды к нормированному уровню, например, усилением и ограничением), частотозависимые цепи, двухконтурные резонансные цепи. Некоторые схемы приемных устройств представлены на рис. 18.4. Цифровые частотомеры в ТИС с ЧМ-сигналами применяются редко, так как при низкой частоте сигналов время измерения с ломощью цифровых частотомеров оказывается относительно большим. Так при f=21 Гц и 6=0,02 f l = 1 / (27-0,02) = 18 с. Заметим, что, видимо, можно добиться лучших результатов, исполь- 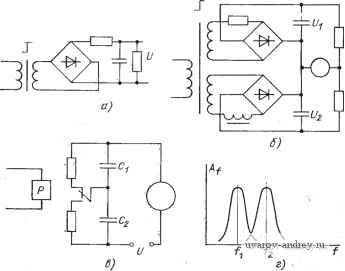 Рис. 18.4. Преобразователи частоты в ток и частоты в напряжение: а - выпрямительный преобразователь; б - выпрямительный преобразователь с приведеии--ем начала динамического диапазона к нулевому значению; е-конденсаторный преобразователь; г преобразователь .на )езонаисиых контурах зуя цифровое измерение периодов или умноженной частоты сигнала, а также измерение частоты со следящим уравновешиванием. На рис. 18.5 представлена структурная схема ТИС с ЧМ-сигналами типа ТНЧ-2, предназначенная для промышленного применения. -~6riUT IwvJ 1 > ЛС J-0-о- Рис. 18.5. Структурная схема ТИС типа ТНЧ-2 На входе ТНЧ используются индукционно-выпрямительные преобразователи угла поворота а в постоянное напряжение. Это напряжение изменяет индуктивность LC-генератора с обратной связью. На приемном конце после усилителя-ограничителя и выпрямителя используются аналоговые показывающий и регистрирующий приборы. Погрешность аппаратуры составляет ±2,5%, средняя частота /о=4 Гц. Дальность работы - порядка нескольких десятков километров. В КС могут быть использованы сочетания ЧМ или ЧИМ с другими видами модуляции. Так, в радиоканалах наиболее часто применяются ЧМ - ЧМ, ЧИМ - ЧМ и др. Вторичная модуляция и демодуляция выполняются в каналообразующей аппаратуре. ТИС V времяимпульсными сигналами Различают широтно- и интервально-импульсные сигналы (рис. 18.6,6). Параметром, переносящим информацию, в широтно-импульсной модуляции (ШИМ) служит длительность импульса, а в интервально-импульсной модуляции (НИМ, иногда ее называют ФИМ) -интервал между импульсами. Минимальная длительность импульса Ттт определяется возможным изменением фронта импульсов, а интервал между импульсами - шириной опорного импульса. Рис 18.6. ТИС с времяимпульсными сигналами: а - схема ТИС; б - широтно- и интервальио-импульсный сигналы Для времяимпульсной модуляции (ВИМ) (под которой будет-пониматься как ШИМ, так и ИИМ) длительность интервала времени пропорциональна величине х. Т=Ттгп+ [Ттах Тщгп) / (Хтах-Xmin)] {х-Хтгп). Сигналы с ВИМ могут передаваться с периодом Т'хтах-Для белого шума s(t) среднее квадратическое отклонение бд/(5)=У5оД/, где So - спектральная плотность мощности в частотном диапазоне А/. За счет действия помехи изменяется фронт импульсов. Для ИИМ ад (Ат)=а(5)/у2а(/ ажА/); ШИМ ттаж-ттт=а(5)/(а(/тажУ2Д/бп), здесь a=fmax/Af, а бп - задан-ная погрешность [17.3, 17.5]. Эти выражения справедливы при относительно невысокой интенсивности помех. Рекомендуется для ИИМ Ти= 1/f та*; Ттг =2ти. Для повышения помехоустойчивости при ИИМ рекомендуется производить оценку полусуммы интервалов времени по передним и задним фронтам, при ШИМ - отбраковку импульсов длительностью менее тты и паузе между импульсами менее Т-т^ах. На передающей части для преобразования измеряемых величин в сигналы ВИМ используются электромеханические преобразователи угла поворота во времяимпульсные сигналы, линейные-преобразователи развертывающего типа, экспоненциальные преобразователи [17.2, 17.8] и т. п. д  Рис. 18.7. Экспоненциальный преобразователь сопротивления или емкости в интервал времени: с - электрическая схема: б -временная диаграмма
в экспоненциальных преобразователях (рис. 18.7) 1 г -f/ = f/[r,/(r. + r,)] и С/с=:С/[1-е~ < % Равенство lJr2=Uc достигается по прошествии xRC\n{(ri-\--\-i2)/ii\ (при VkR). в таких преобразователях т может изменяться от микросекунд до десятков секунд, а преобразование может производиться с погрешностью до ±0,1%. в приемной части длиннопериодных ТИС {Тс от 5 до 50 с) используются секундомеры, самописцы и пр., а короткопериодных (Гс меньше 5 с) - цифровые измерители временных интервалов или аналоговые измерительные приборы после обратного преобразования интервала времени в напряжение или ток. В канале связи ТИС передаваемый сигнал может иметь сложный вид модуляции (например, ШИМ - ЧМ). Итак, особенности, накладываемые на аналоговые ТИС нали-чием каналов связи, сводятся к следующим. В ТИС при передаче по проводному КС сигналов постоянного тока необходимо учитывать влияние распределенных омического сопротивления и проводимости утечки. При передаче по проводному КС сигналов переменного тока необходимо особо учитывать наличие реактивных сопротивлений ИС, которые могут влиять в первую очередь на крутизну фронтов и фазовые искажения, а также привести к существенному затуханию сигналов. Повышение точности передачи в таких ТИС связано с увеличением временных параметров сигналов почти линейной зависимостью. Использование радиоканала в ТИС возможно только в том случае, если по каналу связи передается сигнал, модулирующий высокочастотные колебания, соответствующие частотному диапазону радиоканала. Этот сигнал может быть результатом сочетания нескольких видов модуляции АИМ-ЧМ, ЧМ-ЧМ, ШИМ- ЧМ и др. Точностные характеристики при этом определяются, в основном, параметрами первичной модуляции. 18.2. ЦИФРОВЫЕ ТИС (СИСТЕМЫ С КОДОИМПУЛЬСНЫМИ СИГНАЛАМИ) В отличие от аналоговых ТИС в ТИС с кодоимпульсной модуляцией (КИМ) сигналов измерительные процедуры, связанные с получением числовых значений величин, производятся на передающем конце, а в КС передаются кодоимпульсные сигналы. Наиболее специфическим и важным для кодоимпульсных ТИС является такая организация передачи информации по КС, при которой была бы обеспечена надежная передача кодоимпульсных сигналов и минимальная загрузка КС. Для передачи КИМ-сигналов используются двоичные и двоично-десятичные коды. Для передачи нуля и единицы служат сигналы КИМ -АМ, КИМ -ВИМ, КИМ -ЧМ (рис. 18.8). Минимальная ширина импульсов ограничивается в первую очередь частотными характеристиками ЛС Ттг 1,25 А/, для проводных Л С А/ 100 Гц. Скорость передачи измеряется величиной I/Tt, где Tj - период тактовой частоты, или в l/imin. Передача кодовой комбинации производится поразрядно, начиная со старшего разряда. Параллельная передача всех разрядов требует наличия и одновременной работы соответствующего количества каналов связи. 10 11
Позиционный код 1
Рис. 18.8. Диаграммы кодоимпульсных сигналов с АМ и ШИМ (с %Ч>1
Рис. 18.9. Структурная схема кодоимпульсной ТИС Структурная схема кодоимпульсной ТИС представлена на рис. 18.9. В этом варианте схемы применена синхронизация генератора ON2 с помощью импульса, характеризующего состояние бс, передаваемого 1 раз за цикл передачи одного числа z. Для преобразования параллельного кода в последовательный и наоборот используют мультиплексоры. Повышение помехоустойчивости обеспечивается с помощью формирования дополнительного кода 2к на передающей части и использования его для выявления и исправления ошибок на приемной части ТИС. Содержательные логические схемы алгоритмов этого варианта ТИС могут быть представлены в следующем виде: начальные условия (p[i=0; /==0; GiV,(/b фО; GNdu Ф.)]Х аналого-цифровое преобразова ние и формирование дополнительного кода X L Фш (/ : =У+ 1) I. {X/Xj) I, = еи 62, Bi, е„] 1,(2/2к=е„+1, .... е^) X коммутация и передача по КС , . ,*.- . Х{11 Ф„, (/: = г + 1; f J I. (z,. z.fei] \\ X X 11 [[ Ф„. i +1; h)h (mji) ]} I,.e {ed I, (S:e,)X X K, (i = /и)! 11 (i = /гаП X; цикловая синхронизация {[I, (ее) (/ = NT] Ikc (бс) I. (CRiAee. (/ ) (Две > (/J Ф„, (f lX; проверка правильности передачи, корректировка и выдача кода XII [12(2, 2k/2]}I2(z). Здесь Абс - амплитуда импульса. . . Индекс 1 при обозначениях операторов отмечает, что они выполняются на передающей части, 2 - на приемной части, а КС - в КС ТИС. Отметим, что можно разработать несколько СЛСА данной ТИС, различающихся, в частности, последовательностью выполнения операторов. Столь же очевидно, что состав функциональных блоков ТИС может быть изменен. Так, например, в приемной части вместо устройств управления, контроля правильности передачи, сравнения можно использовать микропроцессор. При измерении большого количества величин X вместо коммутаторов могут быть использованы сканирующие устройства; представляет интерес использование на передающей части мультиплицированных измерительных цепей с ассоциативной обработкой (см. гл. 8). В отличие от передачи аналоговых сигналов, где КС. входит в аналоговую измерительную цепь и может вызвать дополнительные погрешности, передача КИ сигналов связана с возможностью искажения или изменения количества передаваемых импульсов. Для кодоимпульсных ТИС нормируются вероятности ошибочного приема одного отсчета (например, рош=10-). Если вероятность искаженного приема р, а правильного приема q, то при передаче п-разрядной кодовой комбинации ((?-Ьр) = ==[(1-Р)+Р] =1- При разложении этого выражения по биному Ньютона [(1-р) -Ьр] = (1-р) +п(1-р) -р + С2 (1-р) -2р2-Ь +С\(1-р) -ЗрЗ-Ь - +Р - Здесь (1-р) -вероятность отсутствия искажений; п( 1-р) -р- вероятность одиночного искажения; С2 (1-р)-р^ - вероятность двойного искажения и т. п. Напомним, что Сп=п\/т\{п-т)\ Если учесть, что p-Cl, то каждый последующий член разложения много меньше предыдущего. При малых п имеем (1-р) р\ Тогда [(1-р)+р] (1-р) +пр--С2 р2-- ... Хр-. Для обнаружения ошибок при передаче кода по КС используется введение в передаваемую кодовую комбинацию избыточных контрольных зарядов. Остановимся на наиболее распространенных способах защиты КИ-сигналов. а) При введении одного контрольного разряда и обеспечении! четного количества единиц в передаваемой кодовой комбинации на приемном конце ИС имеется возможность обнаружить нечетное количество ошибок (одиночные, тройные и др. нечетные ошибки). Вероятность ошибки передачи при этом будет приближенно определяться вероятностью появления двойных и вообще четного количества ошибок: Рош=С'2 р2 б) Если формировать код с постоянным числом единиц, то возможно обнаружение единичных ошибок, а также части ошибок кратных Рош=С^пра, где а<1. в) Если используется повторная передача кода, то Рош={п/2)р^ и обнаруживаются все нечетные и часть четных ошибок. г) При исиользовании кода Хемминга полное число возможных реализаций избыточного двоичного кода с количеством разрядов п составляет 2 /(i+l)2 , где и-количество информационных разрядов. Количество контрольных разрядов й=и-и определяет возможное число проверок на четное количество единиц в проверяемых комбинациях, а значение каждого контрольного разряда определяет четность единиц в данной комбинации. В зависимости от количества информационных разрядов и значения кип равны: 2 3 5 6 4 10 8 11 4 5 12 16 Позиция контрольных разрядов в передаваемом слове равна 2, т. е. 1, 2, 4, 8.... Проверяются комбинации: при первой проверке 1©3®5®7®9 при второй 2ФЗ. 6 07, 10011 .... при третьей 4Ф5Ф6Ф7, 12Ф 13Ф 14Ф15... Кроме того, производится проверка на четность всего слова. Приведем простейший пример. Положим и=2. Разрешенные кодовые комбинации при передаче информации разрядами на позициях 3 и 5 таковы: Позиции
Положим, принята комбинация 110001. Тогда первая проверка дает нечетное количество единиц, вторая-нечетное, третья-четное, четвертая-нечетное. Во все неправильные комбинации входит третья позиция. Следовательно, необходимо исправить третий разряд, т. е. 111001. Выбрать вид защиты можно, если заданы вероятность ошибки :приема, а также характеристики КС. Пусть [17.3] и=8 и требуется обеспечить вероятность ошибки в передаче слова Рош= 10-, а КС обеспечивает вероятность ошибки при передаче одного разряда/7. Тогда прирЮ- Р*ош=8р=8-10-, т. е. никаких мер защиты применять не нужно; при р^Ю-* и использовании контроля на четность п=8--1=9, С^др= ==(9-8-7!/2!7!)-10-8=3,6-10-; наконец, при р<10-з и использовании кода Хемминга п=12 Р*ош=Сз,2Р^=(12-11 10-9 !/3 ! 9 !)Х X10-8=2,2 10- Следует отметить, что при помехе S() вероятность искажения р= f (s) ds - F(UJa). При увеличении отношения уровня сигнала к среднему квадратическому значению помехи вероятность ошибок резко уменьшается [17.4, 17.5]. Так, при приеме двухпозиционного сигнала идеальным приемником Um/o=3, р=1,3-10- а при f; /a=4,5 р=3,4-10-б. Следует обратить внимание на то, что в кодоимпульсных ТИС повышение точности передачи приводит к увеличению количества разрядов, но это не требует больших (как в аналоговых ТИС) временных затрат. Повышение помехоустойчивости кодоимпульсных ТИС может быть достигнуто использованием информационной или решающей обратной связи. Для организации работы таких систем необходимо иметь дуплексный КС или два симплексных КС, обеспечивающих передачу информации в двух направлениях. В ТИС с решающей *ПРД ПРД ПРД ПРД Рис. 18.10, Структурная схема ТИС с обратной связью: о -тис с решающей обратной связью; б -ТИС с информационной обратной связью; ЯРД-передатчик; - линия связи; ПР -приемник; РУ -решающее устройство- Ан - анализатор обратной СВЯЗЬЮ (рис. 18.10) используются избыточные коды, позволяющие обнаружить ошибки на приемной части системы. Если ошибка обнаружена, то после переспроса передача информации повторяется. В ТИС с информационной обратной связью принятая по прямому КС информация передается по обратному КС, сравнивается с той, что передавалась по прямому КС, и при необходимости цикл передачи информации повторяется. В ТИС с информационной обратной связью могут использоваться коды без избыточности. Замкнутые ТИС создаются при повышенных требованиях к надежности передачи информации. 1 ... 28 29 30 31 32 33 34 ... 44 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |