


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 26 27 28 29 30 31 32 ... 44 подготовке к последующему анализу (например, в выделении контуров сложных фигур). Собственно процесс опознания осуществляется в ассоциирующей системе, являющейся комбинацией устройств обработки и сравнения обработанного изображения - описания объекта - с описанием обобщенного образа (аналог описания нормы в САК), находящимся в устройстве памяти. Ассоциирующая система производит опознавание по определенному решающему правилу. Далее будут использоваться следующие обозначения: Q= = {Qu Q2, -, Qi,-, Qn)-объекты распознавания; Xi={xn, jci2,...,Xim); Zi - входные величины от объекта Qi, воспринимае- Peis,enmopHoe Ассоциирующая устройство Фильтр система Изовражение д Рис. 16.1. Структурная схема распознающей системы мые распознающей системой (РС), и их значения; признаки распознавания G{FX) или G{F, Z), являющиеся функцией входных величин: q=(qu q, 9/, qm); Qo=(Qoi. Q02, Qoft, -, Qoif)-образы; C=(ci, C2, Cj, Cm)-признаки, характеризующие образы; R={Ri,...,Ri,...,Rl)-решающие правила, ло которым производится отнесение объектов к образам. При распознавании основной задачей является классификация, т. е. выявление объектов, относящихся к заданным образам. Частными случаями при этом будут выделение объектов, соответствующих и не соответствующих описанию заданного образа (видимо, это может быть сведено к задачам контроля), нахождение объекта с заданным индивидуальным описанием среди дру-тих объектов (видимо, это может быть сведено к задачам поиска), классификация (распределение) объектов по отношению к заданным образам [16.1, 16.2]. В теории распознавания выделяется также задача таксономии, т. е. определения количества образов, на которые может быть разделено данное множество объектов, по заданным решаю-,щим правилам. Эта задача далее не рассматривается. Признаки распознавания должны позволять количественно оценивать наиболее важные свойства объектов распознавания и образов. В качестве признаков используются функции от входных величин, воспринимаемых РС от объектов распознавания. Естественно, что сами входные величины могут, если это необходимо, использоваться также в качестве признаков распознавания. Выбор признаков распознавания производится с учетом особен- ностеи решаемых задач распознавания, анализа информативности свойств объектов и образов. Если определены признаки и границы их значений для образов, то для распознавания необходимо определить решающее правило, по которому следует относить объект к какому-либо образу. Если образ Qo представляется областью в многомерном пространстве, то в качестве решающего правила может выступать условие, чтобы расхождение координат объекта и образа в этом пространстве не превышало заданного значения. В зависимости от особенностей образов используются разнообразные меры уклонения. Наиболее простой мерой уклонения является сумма модулей разностей между координатами объекта и образа: В евклидовом метрическом пространстве в качестве метрики выступает расстояние между точками Q с координатами х и Qo-. Если /-(Q, Qo)e, где е - допустимое уклонение, то предъявленный объект соответствует обобщенному образу Qo. Если имеется несколько эталонных образов (Qofe) k=\, 2,..., К, то процедура поиска эталонного образа, соответствующего данному объекту, сводится к нахождению Qcft, для которого rs. Если в пространстве образа С заданы плотности вероятностей то при их интегрировании по соответствующей области пространства можно определить вероятность того, что опознаваемый образ принадлежит этой области. Если известны перекрывающиеся по аргументу плотности распределения вероятностей /о (С) признака распознавания образа Qo и l{q) объекта Q и граница а выделения области существования образа Qo, то можно определить вероятность того, что объект Q будет отнесен к образу Qo:p(q)= f{q)dq, а также вероят- а ность правильности классифицировать образ Qo:p{C) = f{C)dC.. а Коэффициент правдоподобия, который используется для принятия решения об отнесении данного объекта к образу, К= Для многомерного случая плотность нормального распределения вероятностей по т признакам распознавания fk}/=.,......, -(2<r exp В случае определения того, относится ли данный объект Q к образу Qo, логарифм коэффициента правдоподобия т -0.5 (М[С,.]=-Ж[9,.П. /=1 Решающее правило при этом выглядит следующим образом: если W{q}0, то QQo, если же W{q}<0, то QQo. Близость между распознаваемыми объектами и образами может быть также оценена нормированными коэффициентами корреляции типа При неполной априорной информацпи об образе установле-жие признаков и количественное описание образов могут производиться в обучаемых РС. Перед обучением энтропия системы максимальна, т. е. изображение может быть отнесено к любому образу с равной вероятностью. При обучении вводится упорядоченность в ответы ассоциирующей системы, и энтропия системы асимптотически уменьшается при увеличении количества обучающих опытов до заданною значенпя. Ниже приводится пример обучающей процедуры. На рис. 16.2 показаны линии /-/, - и III-III, разделяющие образы Qoi, Qo2 и Qos попарно и полученные при неизвестных заранее границах о'ластей существования этих образов. При обучении системе предъявляются последовательно образы, положим Qoi и Qo2 (и об этом выводится соответствующая информация), подбираются коэффициенты щ и определяются выражения т т 2 i4n=bu 2 iQi2=b2. Затем выбирается число .Qm+i, лежащее в диапазоне mm{bi, ig) Gm-biniax(ii, 62), при котором линейная функция Qi- -1-1 принимает для одной зоны значение больше нуля, для другой меньше нуля и, следо-зательно, разделяет эти зоны. Такая функция на рис. 16.2 предоставлена сечением /-/. Затем последовательно производится обучение для областей / и 3 и нахождение сечения - , областей jI  -III Рис. 16.2. Нахождение линий, разделяющих области 2 и (? и сечения Ни одно из сечений не годится для разделения трех областей. Поэтому выбирается сложное сечение, показанное на рис. 16.2 пунктиром. Имеются данные, показывающие, что в подобных системах можно добиться 95-99% правильного отнесения объектов распознавания 10 образов. В пространстве рецепторов удается разделить четко образы лишь в небольшом числе задач. Часто признаки опознания различных образов совпадают. Поэтому возникает необходимость преобразования пространства ответов рецепторов в другое пространство, позволяющее разделить образы более определенно. Одна из первых попыток преобразования пространства рецепторов во вспомогательное пространство сделана в так называемых перцептронах (под термином перцепция в психологии и философии понимается восприятие действительности органами чувств). Остановимся на сути работы трехслойного а-перцептрона (рис. 16.3). Он состоит из рецепторного поля, поля ассоциирующих элементов Ai, ..., Am, усилителей с переменным коэффициентом усиления и сумматора - решающего устройства R. Ассоциирующие элементы связаны с рецепторами с помощью возбуждающих (-[-) и тормозящих (-) связей и имеют определенные пороги срабатывания. Организация связей с рецепторами и пороги срабатывания ассоциирующих элементов устанавливаются до начала процесса обучения случайным 9б1разом. Процесс обучения заключается в том, что перцептрону показывается объект класса I, при этом возбуждаются некоторые о о о о с о' г о с. о о с 6 - о 6 о о I осе с с с сое о с <- о с с с с с с
Рис. 16.3. Схема а-перцептроне элементы А и коэффициенты усилителей, связанные с ними, увеличиваются на 1. Затем показывается объект класса II и у возбудившихся ассоциирующих элементов уменьшается коэффициент усиления усилителей. После многократно повторенной процедуры обучения устанавливаются определенные коэффициенты усиления усилителей. При экзамене показывается неизвестный объект. Если сумма сигналов от А положительна, то в блоке R принимается решение, что объект относится к классу I. Таким образом, в перцептроне пространство рецепторного поля преобразуется (с помощью организации связей и порогов срабатывания) в пространство А элементов. Совокупность значений коэффициентов усиления усилителей задает в -пространстве некоторую поверхность, разделяющую объекты разных классов. Если предположить, что каждый элемент А связан с одним рецептором возбуждающей связью, сигнал от возбужденного рецептора и порог срабатывания элементов А равны 1, то в конце обучения значения коэффициентов усиления будут отражать, насколько часто встречаются точки объекта на рецепторном поле. Были построены и испытаны а-перцептроны с различным количеством рецепторов (256, 400, 512 и др.), элементов Л (от 400 до 5000) и связей между ними (от 5 до 30). В а-перцептронах оказываются недоступными для опознания объекты, перемещающиеся по рецепторному полю и изменяющиеся по масштабу. Чтобы производить распознавание в этих случаях, необходимо применение специальных алгоритмов работы системы [16.4]. Заметим, что добиться высокой правильности распознавания образов с помощью а-перцептронов не удалось. Однако в методологическом плане, с точки зрения преобразования пространства изображения во вспомогательное пространство, идеи, реализованные в а-перцептроне, важны. При обучении возможна реализация алгоритма коллективного решения [16.2]. Формально задача коллективного решения описывается следующим образом: если имеются вектор входных величин А или признаков G и частные решения Si, s<i,...,su принимающиеся по решающим правилам Rx, R2,..;Rl, то коллективное решение есть S=f(si, s2,...,sl, G\X), где F - алгоритм принятия решения. Для каждой конкретной ситуации правило Ri приводит к решению sr. {G\X)Qok, k=\, 2, К. Если ввести нормированный вес для каждого решения щ, то коллективное решение {G\X)Qok принимается по максимальной сумме весов. Выявление наиболее авторитетных решений может быть выполнено с помощью обучения (рис. 16.4). Учитель здесь выдает информацию о принадлежности поступающего множества признаков или входных величин (G, X) данному образу. В процессе обучения устанавливаются веса щ и повышается достоверность S. Очевидно, во многих случаях метод коллективных решений с опытным определением весов существенно лучше равно- мерного голосования или использования одного решающего правила. Можно утверждать, что в системах, распознающих технические объекты, применение метода коллективного решения может быть полезным. Остановимся на примерах применения распознающих систем. Для распознавания случайных сигналов используются в качестве признаков спектральные плотности мощности на некотором наборе полос частот. При обучении подбираются коэффициенты разделяющих функций, при которых они принимают неотрицательные значения, если распознается объект, относящийся к данному образу, и отрицательные - в противном случае. В качестве разделяющих функций чаще всего используются 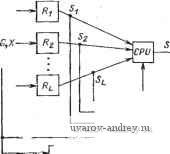 Учитепь
Рис. 16.4. Распознающая система с коллективным решением или ряд т 1. й,-/?,=:0 / m m ч I например, о. -f Ц aq -j- г^у' Известны спектральные PC, использующие до 32 полосовых фильтров. Один из вариантов системы распознавания случайных сигналов представлен на рис. 16.5 [16.4]. В, этой системе признаки распознавания <7i,..., <7i5- спектральные плотности мощности x(t)  и д Рис. 16.5. Структурная схема системы распознавания случайных сигналов для пятнадцати полос частот, математические ожидания которых M(qi) известны. При обучении подбирается такое значение Rj, при котором W{G, М) £ [<?з-М(5)]2-i/O при анализе сигнала, относящегося к заданному образу. Учитель при обучении сопровождает анализируемый сигнал информацией об отношении его к заданному образу (положим, в виде кода образа), а также сообщает ограничение на размер Rj. Время анализа и распознавания сигналов - примерно 5 мс. Коммутация аналоговых признаков {Qj}, их аналого-цифровое преобразование и запись значений признаков в память производятся за 15 мкс. Количество образов может быть довольно большим: в [16.4] описывается устройство, распознающее до 170 образов. Голографические РС [16.5] позволяют производить распознавание изображений с относительно высокой скоростью (от 10 до 10 изображений в секунду благодаря параллельному анализу голограмм) и при малых pasMeipax голографических фильтров (примерно 0,1 см на один фильтр). Дактилоскопия, поиск химических элементов по спектрам их поглощения, навигация по наземным ориентирам - далеко не полный перечень применений голографических РС. Голографические распознающие системы являются оптико-электронными системами. В таких системах можно реализовать полезное сочетание высокой щроизводительности оптических методов сбора и обработки информации с логическими и вычислительными возможностями ЭВМ. В. Телеизмерительные системы (ТИС) Глава 17 ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТЕЛЕИЗМЕРИТЕЛЬНЫХ СИСТЕМ И ЛИНИЙ СВЯЗИ 17.1. ОСОБЕННОСТИ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТЕЛЕИЗМЕРИТЕЛЬНЫХ СИСТЕМ Главной отличительной особенностью телеизмерительных информационных систем (ТИИС) является наличие в них каналов связи большой протяженности - более нескольких километров. Виды и характеристики каналов связи, как правило, решающим образом влияют на выбор структуры и параметров ТИИС. В таких системах при протяженности каналов связи в сотни километров сооружение линии связи вместе со средствами каналообразо-вания, включая модуляторы, демодуляторы, фильтры, усилители и пр., обычно дороже, чем построение остальных частей ИИС, а плата за аренду готовых каналов связи превышает все эксплуатационные расходы ИИС вместе с годовыми амортизационными расходами. Среди функций, выполняемых ТИИС, наибольшее значение имеют функции телеизмерения, а среди них - такая организация процесса измерения, при которой передача измерительных сигналов по каналу связи не вносит погрешностей, превышающих заданное значение. Именно ввиду исключительной важности функции измерения ограничимся рассмотрением только телеизмерительных систем (ТИС). Современные ТИС имеют более богатую предысторию, чем ИИС ближнего действия. До середины 50-х годов создавались отдельные устройства с использованием амплитудно-модулиро-ванных сигналов, проводных каналов связи и релейно-контактных устройств. Со второй половины пятидесятых годов получили развитие системы с частотной, фазовой модуляцией, а также с импульсными видами модуляции сигналов, с применением бесконтактных элементов и многократным использованием линий связи. Начиная с 60-х годов при построении ТИС используются структурная и функциональная избыточность, типизация элементов и структур, передача по каналам связи кодоимпульсных сиг-Налов. В настоящее время уровень развития ТИС определяется использованием агрегатного комплекса средств систем телемеханики (АСТТ) ГСП, основанного на применении современных интегральных микросхем, универсальных вычислительных устройств, измерительных преобразователей и т. п. Можно указать следующие основные направления классификации ТИС: а) но назначению - ТИС общепромышленного назначения и ТИС для исследований и испытаний; б) по линиям связи - ТИС с проводными и беспроводными линиями связи; в) по конфигурации каналов - ТИС с разомкнутыми и замкнутыми каналами связи; г) по виду сигналов - ТИС с аналоговыми (непрерывными и импульсными) и кодоимпульсными (цифровыми) сигналами в КС. Изучение ТИС промышленного назначения связано с некоторыми методическими трудностями, определяемыми тем, что самостоятельно такие ТИС создаются редко. Функции ТИС обычно выполняются в системах телемеханики совместно с функциями телеуправления, телерегулирования и обмена буквенно-цифровой информацией. В реализации ТИС участвуют не только измерительные преобразователи, но и устройства, являющиеся общими для всей системы телемеханики. Необходимо сказать, что по ТИС имеются учебные пособия [17.1, 17.2] и книги .[17.3-17.8], нанисанные на хорошем профессиональном уровне. Однако в них изложение ведется со своей терминологией, обозначениями и, конечно, с неизбежным повторением некоторого материала, являющегося общим для ИИС. Эти обстоятельства затрудняют изучение материала по ТИС, являющегося лишь одним из разделов общего курса ИИС. В связи со сказанным ниже приводится материал по ТИС, ограниченный требованиями программы курса ИИС. Конечно, для специальных дисциплин по ТИС, для их более глубокого изучения должна быть использована соответствующая литература. Ниже приводится несколько основных требований к телеизмерительным устройствам. Устанавливаются следующие классы точности устройств ТИС: 0,25; 0,4; 0,6; 1,0; 1,6; 2,5; 4,0. Дополнительная погрешность не должна превышать основной, соответствующей классу точности, при изменении напряжения питания на +10 и -15% номинального значения и частоты от 49 до 51 Гц, уровня измерительного сигнала вдвое (кроме сигналов с амплитудной модуляцией), отношения уровня амплитуды к эффективному значению напряжения помех в рабочей полосе частот устройства для аналоговых сигналов постоянного тока до 10, а для импульсных сигналов переменного тока до (9+0,02Х ХА/) YI/AF (здесь А/ - наибольшая ширина полосы пропускания одного из индивидуальных каналов от 3 до 140 Гц и Af - диапазон частот устройства), внешнего магнитного поля до 400 А/м. Дополнительная погрешность при изменении внешней температуры от ±5°С до -50 °С может достигать до ±1 К, от --30 до +50°С -до 1 К, от -50 до -f50°C -±1,5 К, где К -класс точности, в зависимости от степени ответственности, телемеханические системы делятся на три группы. Устанавливаются вероятности ошибок при передаче команд телеуправления (для 1-й группы- 10- для 2-й-10-°, для 3-й-Ю-) и кодоимпульсных сигналов на отсчет (соответственно Ю-, 10- и 10-). Для оценки динамических свойств аналоговых ТИС применяются такие показатели, как время установления, предельная частота и частота среза. Временем установления называется время, по прошествии которого выходная величина ТИС после скачкообразного изменения входной величины на половину максимального значения не станет отличаться более чем на ±6% (обычно ±1%) установившегося состояния. Это время для различных групп устройств может быть до 1 с, до 4 с, более 4 с. На предельной частоте синусоидального входного сигнала динамическая погрешность передачи устройством амплитуды не должна превышать заданного значения, а на частоте среза амплитуда выходного сигнала становится равной этой погрешности. Детальное рассмотрение переходных процессов в аналоговой части ТИС связано с анализом дифференциальных уравнений, описывающих ее состояние. Динамические характеристики кодоимпульсных ТИС не регламентированы. Наиболее широко для количественной оценки ди- намических свойств ТИС, работающих в реальном времени, применяется время, необходимое для выполнения процесса измерения (включая и передачу информации но каналу связи). Для тех ТИС, в которых происходит промежуточное запоминание измерительной информации, а также для отдельных частей ТИС (например, частей ТИС до и после ЗУ или передающей и приемной частей ТИС и канала связи) используется несколько временных характеристик. Помехоустойчивость, т. е. способность ТИС противодействовать влиянию помех, оценивается в конечном счете погрещностью, вызываемой влиянием помех. Эта погрещность является сложной функцией вида и характеристик модуляции и каналов связи, используемых в ТИС. В теории связи используются понятия потенциальной помехоустойчивости и идеального приемника, введенные В. А. Котельни-ковым. Они связаны с оценкой дисперсии разности принимаемого сигнала с шумом Xf{t)=x{t)-\-S{t) и сигнала, генерируемого в приемнике, о Идеальным считается такой приемник, у которого D,-=0 при идеальном синфазировании помехи и генерируемого сигнала. Реальные приемники имеют Z)i¥=0. Однако, используя понятие идеального приемника, можно сравнить между собой различные приемники, а при известных значениях передаваемого сигнала - оценить необходимые параметры приемника. Например, при передаче импульсов 1 и О кодоимпульсных сигналов D-[U{t)-U{t)rdt-j[Ut)-2U(t)-]- U(t) + Um)]dt. .. --. Ьсли и (t) - и^, то т D,D--§U U{t)dt + D о а если U(t) - С/ , то т D,D-{-UU{t)dt + D . о Разность D.-D = 4-i-C/ f;p(0*. . о - . 1 ... 26 27 28 29 30 31 32 ... 44 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |