


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 25 26 27 28 29 30 31 ... 44 ностей объектов, при распознавании - к каким классам относятся исследуемые объекты. Однако процессы контроля, диагностики и распознавания образов имеют общую методологическую основу: в каждом из них производятся сравнения величин, характеризующих исследуемые объекты, с образцовыми величинами и анализ результатов сравнений. Если ограничиться процессами контроля, диагностики и распознавания, выполняемыми с материальными объектами, то совершенно очевидной становится общность их структур и основных алгоритмов. Для специалистов в области ИИТ, которые могут участвовать в создании и эксплуатации систем технической диагностики и распознавания образов, целесообразно перед специально направленным изучением этих систем ознакомиться с основами их построения. Установление факта и места неисправности в технических объектах, а также ошибок в их программах путем определения состояния всех элементов и связей обычно нецелесообразно или практически невозможно. Это объясняется тем, что для такого стопроцентного контроля требуются большие затраты времени, труда и оборудования. Особенно это относится к сложным техническим объектам (машины, комплексы, системы), характеризующимся большим количеством элементов и сложными связями между ними. Например в микро-ЭВМ, устройствах памяти и других цифровых информационных устройствах могут насчитываться сотни тысяч элементов. Работоспособность таких объектов зависит от состояния и совместного функционирования всех этих элементов. По-видимому, основной путь выявления неисправных технических элементов и ошибок в реализации программ технических объектов связан с рациональной и эффективной методикой проведения операций контроля, позволяющей решить задачу диагностики с допустимыми затратами. Изучение форм и закономерностей проявления неисправностей и ошибок, разработка методов и средств их обнаружения и локализации в объектах диагностики- таковы основные цели технической диагностики как научной дисциплины. Объекты технической диагностики могут характеризоваться величинами, имеющими непрерывный или дискретный характер. В непрерывных объектах диагностики могут контролироваться температурные поля (положим, инфракрасное излучение интегральных микросхем), акустические шумы (в двигателях внутреннего сгорания), радиочастотные флюктуационные помехи (возникающие, в частности, в радиодеталях, контактах), электрические токи и напряжения и т. п. Восприятие информации при диагностике объектов с непрерывными величинами, характеризующими их свойства, производится с помощью технических средств и алгоритмов измерения и контроля, описанных ранее. Алгоритмы диа- гностики при этом должны учитывать специфику исследуемых объектов [15.1, 15.2]. В дальнейшем изложении рассматривается диагностика дискретных технических объектов. При создании систем технической диагностики нужно различать следующие основные этапы: изучение объекта диагностики, связанное с выделением состояний элементов, контролируемых величин, сбор необходимых статистических и иных данных, оценка затрат труда на проверку; построение математической модели объекта и ее исследование, связанное с разработкой программ и диагностики объекта; построение диагностической системы. Отметим, что успешное создание математической модели во многом зависит от степени знания свойств объекта диагностики и в свою очередь определяет эффективность принятого метода поиска неисправностей. Дискретными объектами технической диагностики являются технические объекты, в которых можно выделить элементы, причем и объект, и элементы могут находиться обычно в двух состояниях - работоспособном и неработоспособном. Если объект содержит элементов, каждый из которых может находиться в двух состояних, тогда отказ объекта можно рассматривать как одно из -возможных 2-1 состояний, вызванных неработоспособностью некоторой комбинации ее элементов. Состояние объекта представляется обычно Л^-мерным вектором, /-Й компонент которого равен 1, если i-й элемент работоспособен, или О, если он отказал. Состояние системы определяется проведением проверок по определенным программам, называемым программами диагностики. Совокупность проверок, достаточная для различения состояний объекта, носит название диагностического теста. Различают комбинационный и последовательный поиск неисправностей. При комбинационном поиске выполняется заданное число проьгрок независимо от порядка их осуществления. Последовательный поиск связан с анализом результатов каждой проверки и принятием решения на проведение последующей проверки. В некоторых моделях известны qi - вероятность выхода из строя i-ro элемента, ti - время, необходимое для выполнения операций контроля, k-количество неисправных элементов. (Предполагается, что вероятность наличия нескольких неисправных элементов Jlqi<qi.) Конечно, в зависимости от математической мо- дели объекта технической диагностики используются различные критерии оценки выполнения программ диагностики: минимальное время операции локализации неисправности, минимальная сумма частных произведений времени выполнения операций контроля и вероятности выхода из строя /-го элемента, максимальное приращение количества информации при выполнении данной операции контроля и т. п. Пусть имеется система, состоящая из последовательной цепочки элементов (рис. 15.1). Тогда в зависимости от степени знания об элементах (в первую очередь вероятностей их отказов) и особенностях их проверки (в частности, времени, необходимого-для выполнения каждой проверки) могут существенно изменяться, диагностические программы. В случае, если отказы всех элементов равновероятны и время, необходимое для выполнения всех проверок, одинаково, то минимальное количество проверок может т Я ш ш 0,05 1 0,1 I 0,15 I 0,г I 0,2 I 0,15 I 0,- I 0,05 fi- I I I I 1 1 1 I I I I I I I IV Ш II J II Ш IV Рис. 15.1. Схема поиска неисправностей в последовательной цепочке элементов;- А - операция поиска неисправностей при равновероятном выходе элементов 1-8 из строя; Б - операции поиска (/-/V) при указанных вероятностях выхода из строя элементов-, цепочки быть получено при использовании метода половинного разбие ния (Л на рис. 15.1). Известные вероятности отказов элементов позволяют учитывать их при последовательности выполнения процедур проверки и тем самым уменьшить минимально необходимое число процедур поиска (для нахождения неисправности в элементах 4 и 5 - две процедуры) {Б на рис. 15.1). На практике выполнение проверок различных элементов связано с различной трудоемкостью. Если известны время t, необходимое для выполнения проверки различных элементов и их сочетаний, и вероятности их отказа р, то при отказах различных элементов можно выбирать наиболее экономный диагностический тест (рис. 15.2). Так, например, если отказал элемент 5, то наиболее эффективный тест, выбранный по минимальным отношениям (Времени проверки к вероятностям появления отказов (показанным на рис. 15.2 в кружках), будет A-B-G6. Для диагностики параллельно-последовательного соединения элементов при составлении диагностической программы последовательного поиска одной неисправности могут быть использованы коды проверок и коды состояний [15.3, 15.4]. Коды проверок Пу определяют элементы, состояния которых проверяются. Количество двоичных разрядов в них равно количеству проверяемых элементов, а значение разряда, равное О, указывает, что данный элемент проверяется, а равное 1-что этот элемент не проверяется (например, при ООП проверяются состояния первого и второго элементов и не проверяются состояния третьего и четвертого). Код состояния обозначается через Кг (в нем О указывает, что элемент работоспособен, а 1-что его нужно проверить), а инверсный код состояния - через Ki- Произведя поразрядно-логическое умножение кода состояния и кода проверки, лолучим НОВЫЙ код состояния. Если результат проверки таков, что проверяемая часть схемы исправна, то новый код состояния поразрядно логически перемножается (ОД 1=0; 0Д0 = 0; 1Л1-1) с новым кодом проверки. Если же проверяемая часть 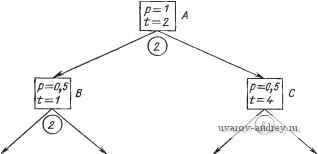

Рнс. 15.2. Схема выбора диагностического теста схемы неисправна, то полученный код состояния следует инвертировать и затем поразрядно выполнить логическое перемножение с последующим кодом проверки. Итак, основной алгоритм этой процедуры ... I (/дФ(п/) [со/(0) 1(/олП;=/С/+,) IX X i{Ki+i\Ki+i) ф(п^+1)... Здесь сй(0) и со (Г) символизируют исправность или неисправность проверяемых элементов (проверяемой части схемы). На рис. 15.3 показана простая структура, для которой коды проверок равны: П1 = 01]1; П2=0011; Пз = 0101; П4=0100. Начальный код состояний /<i = llll. Если при выполнении П2 получается результат сй2(0), то новый код состояния К2~ =1111Д0011=0011. Если проверка Пг показала, что получается схема 15.3. Диагностируемая 0)2(1), т. е. проверявшаяся часть схемы неисправна, то 2=1100 и необходимо проверить 1-й и 2-й элементы. Если при выполнении проверки Пз выявлено, что эта часть схемы исправна, т. е. сйз(О), то /Сз=Я2ЛПз=0011Д0101 =0001, т. е. неисправен 4-й элемент. Использование кодов состояний и проверок позволяет произвести оценку возможных вариантов программ по заданному критерию. Все элементы схемы, охваченные обратной связью, при таком анализе объединяются в один элемент. Если необходимо определить исправность элементов, охваченных обратной связью, то последнюю необходимо разорвать. При разработке программ можно использовать комбинированные неповторяющиеся проверки типа П,-П/; П/-ПгПт и др. Оценку и выбор диагностических программ можно производить, используя информационные, минимаксные или другие критерии, в наибольшей степени соответствующие характеру объема и задач исследования. При наличии большого количества элементов и сложных связей между ними диагностические тесты существенно усложняются. Системы технической дагностики (СТД) сложных технических объектов, реализующие диагностические программы, которые позволяют выявлять и локализовать аппаратурные неисправности и программные ошибки, основываются на использование ЭВМ или УВМ, обладающих достаточной емкостью памяти, соответствующим быстродействием и другими характеристиками. В состав таких СТД обязательно входят генераторы тестовых сигналов, устройства сбора аналоговой и дискретной информации. По существу, такие СТД выполняют не только функции диагностики, но и контроля и измерения, сопровождающиеся необходимыми вычислительными процедурами. Особую сложность для диагностики представляют цифровые информационные устройства. Помимо огромного количества элементов и связей между ними при диагностике необходимо учитывать, что в таких устройствах возможно проявление дефектов на определенных частотах и на различных последовательностях сигналов, что кроме аппаратных неисправностей имеются программные ошибки. Все сказанное настоятельно потребовало создания новых методов и относительно простых и доступных средств диагностики, удовлетворяющих требованиям как разработчиков, так и потребителей цифровых устройств. Такие методы и средства были созданы и реализованы в виде так называемых анализаторов логических состояний (АЛС). При контроле с помощью АЛС на входы объекта диагностики пода- ется последовательность известных двоичных кодоимпульсных сигналов, а с выходов или обобщенного выхода объекта снимаются определенным образом отбираемые кодоимпульсные сигналы. Эти сигналы могут сопоставляться с образцовыми сигналами, соответствующими правильной работе диагностируемого объекта. Результаты такого сопоставления могут использоваться для решения задач диагностики. Первые АЛС были разработаны в начале 70-х годов. В настоящее время они выпускаются промышленностью во многих странах мира и получили широкое применение. Синхронизация Д 2п <P(S\R) Рис. 15.4. Вариант структуры анализатора логических состояний Один ИЗ вариантов структурной схемы АЛС представлен на рис. 15.4. На каждом синхронизирующем такте, реализующемся через интервал времени А^, на входы АЛС от объекта диагностики поступают нормированные импульсы, принимающие состояние е(0) или е(1), и импульсы синхронизации. Совокупность состояний ей,..., е^г образует слово Zi-Емкость памяти АЛС позволяет записать т слов Zi, т. е. Z=(zi, Zm), а на экране дисплея или другого устройства индикации-визуализировать Z =(z i, z,im) слов, представляемых в формате индикации (рис. 15.5). Кроме чисел на устройстве индикации могут представляться потактовые реализации слов в виде временных диаграмм (рис. 15.6). Далее рассматриваются два режима работы АЛС с синхронной работой. Первый из них предусматривает занесение в память АЛС слов, реализовавшихся после установленного и маскированного кода ОСзФОСт запуска (т. е. выбранного оператором кода, у которого не принимаются во внимание определенные разряды) и задержки на h тактов: Ф(В) Ф(ОСзеОСт=ОС,; ts=hM; i=0)X X Ф (i: = i+1; АО I (ей,. , e ,/z,-) X XI(Zi©DC, = DC) co(DC=l)X X I(2A0 cu(2A=M0X X[l{S:Zi+h) ...I{S.Zi+ + г)]X Xl{Z/Zn) I(R:Z ) Ф(Е), где Ф - сложение по модулю 2. &te - Atj At,2 At Ati Ta5nuu,a может разбиваться на части 11 00110111 0010 ,0 ,0,Т ,1 ,0 ,0,1 ,1 ,0,0 ,1 ,1 ,0,0 1 г 3 5 6 7 8 3 10 11 12 13 115 16 Выходы объекта ила разряды слова Рис. 15.5. Табличное представление сигналов в АЛС  2 3 Ji- 5 6 7 8 3 10 11 1Z13 П 15 16 Выходы Рис. 15.6. Представление сигналов АЛС в виде временных диаграмм Второй режим позволяет запомнить и проанализировать реализации слов до такта, определяемого маскированным кодом остановки: Ф(В) Ф(ОСоеОСг„=ОС2; hhAt; i=0)X X Ф (i: = i-Ы; At) I (ей, eni/zt) I (S : Zi) X X co(z,eDC2=l) 1(2Л0 a(LAt=hAt)X ХФ(5 :zi) I(Z/Z ) KR-.Zn) Ф(Е). Кроме указанных в АЛС могут быть введены режимы записи в память образцовых сигналов, сравнения их с реализованными сигналами с указанием адреса несовпадения, выделения заданных реализаций и т. п. В распространенных относительно простых анализаторах логического состояния слова имеют от 8 до 32 разрядов, память от 16 до 256 бит на разряд, цифровую задержку до ±2 тактов, частоту записи от 1 до 20 МГц. Часть АЛС имеют выход в стандартные цифровые интерфейсы. Анализаторы логических состояний используются как на стадии разработки цифровых систем, так и при контроле выполнения ими программ в реальном времени, позволяя при этом выявить аппаратные неисправности и ошибки программ. Однако эффективно работать с АЛС могут операторы относительно высокой квалификации. Широкое распространение цифровых информационных устройств, особенно микропроцессоров и микро-ЭВМ, потребовало разработки более простых и эффективных методов и средств выполнения диагностических процедур. В 1977 г. в США был разработан метод, названный сигнатурным анализом. Идея его основана на преобразовании (сжатии) длинной выходной двоичной последовательности контролируемого объекта в короткое слово, называемое сигнатурой, или ключевым кодом. Сопоставление набора сигнатур, полученных в различных узлах (внутренних и внешних) контролируемого объекта, с аналогичным набором образцовых сигнатур, заранее рассчитанных или полученных с заведомо исправного устройства, позволяет локализовать неисправный элемент с точностью, определяемой структурой объекта и выбором контрольных точек. В качестве ключевых кодов могут быть использованы различные характеристики двоичных последовательностей - количество единиц, количество переходов - изменений значений двоичных символов на противоположные значения и т. п. Широкое распространение получил сигнатурный анализатор, функциональная схема которого изображена на рис. 15.7. Анализатор содержит 16-разрядный сдвиговой регистр (PC), устройство суммирования по модулю два, устройство управления и индикатор. Теоретические основы подобных устройств подробно рассмотрены в литературе по помехоустойчивому кодированию. Здесь же приведем его СЛСА: Ф(В) 1 Ф(г: = 1(еог) (е/=1)Х Xl(eoi®e7i®esi®ei2i®ei6i=ei) X Г X [I (еш : = ei5i) Ш (eisi: = ещ) II... X - X.. .111 {e2i: = ей) III (ей : = е,) ] го (iN) j X XI(R:Z)®(E). ® П Синхронизация Рис. 15.7. Сигнатурный анализатор с регистром сдвига Здесь ;V - длина преобразуемой последовательности; Z= (eie.v, Sis.-t, £\n) - результат преобразования - сигнатура. Сигнатура может отображаться в двоичном или шестнадцате-ричном формате в обычной или специальной мнемонике. Сжатие двоичной последовательности может привести к пропуску ошибок. Однако доказано, что применение рассмотренного выше анализатора обеспечивает стопроцентную вероятность обнаружения однократных ошибок при любом Л^, двукратных - при N2-1, где т - количество разрядов в сигнатуре. Вероятность всех ошибок (произвольной кратности) не превышает 2- , для т=16 эта сероятность составляет 0,002%, что считается достаточным при контроле сложных цифровых устройств. При однократной ошибке имеется возможность локализовать такт, на котором произошла ошибка. Контроль сигнатурных анализаторов можно производить, подавая на вход известные последовательности двоичных символов. Так, при подаче на вход сигнала ег=1, i==l, 2,...,N, сигнатура полностью определяется структурой обратных связей и может быть легко проконтролирована. Локализующая способность сигнатурных анализаторов, видимо, может быть улучшена разбиением исходной последовательности на интервалы; сочетанием различных методов сжатия и аналогичными методами. Завершая рассмотрение СТД, необходимо обратить внимание на то, что резкого повышения эффективности диагностических процедур можно добиться при проектировании объектов с учетом их последующего диагности ования. г л а в а 16 J О РАСПОЗНАЮЩИХ СИСТЕМАХ Под образом понимается наименование области в пространстве признаков, в 1чоторой отображаются общие свойства выделенного с определенной целью множества объектов [16.1], а под. распознаванием образов - процесс, в результате выполнения которого определяется соответствие между распознаваемыми объектами и образами. Это соответствие устанавливается путем сравнения объектов и образов по признакам, характеризующим; свойства образов, и принятия по определенному алгоритму реще-нкя о принадлежности распознаваемых объектов к тому или иному образу. Образами могут быть море , музыка Чайковского , человек , круг , буква К , нормальное состояние объектов контроля , синусоидальное колебание , нормальный закон распределения вероятностей и т. п. Область интересов ИИТ связана с распознаванием технических образов, к которым можно отнести материальные объекты и> явления, описываемые с помощью количественно определенных, признаков, значения которых получаются экспериментальным путем. Очевидно, что между задачами распознавания технических, образов, автоматического контроля и технической диагностики! имеется много общего. Однако распознавание технических образов имеет свою область применения, связанную с отнесением объектов к тому или-иному образу, в отличие от контроля и технической диагностики,. при которых оценивается текущее состояние или выявляется место или причина неисправности данного объекта. Классификациа биологических микрообъектов, распознавание радиосигналов w изображений (например, дактилоскопических оттисков) и т, п.- вот далеко не полный перечень областей применения методов и средств распознавания технических образов. Структура систем, выполняющих распознавание технических образов, соответствует обобщенной структурно-функциональной-схеме ИИС (см. рис. 1.1). Для описания системы распознавания образов (СРО) в литературе применяется своеобразная терминология, на которой следует остановиться (рис. 16.1). Исследуемый объект часто называется оригиналом, воспринимающие элементы - рецепторами, а их совокупность - рецепторным полем. Реакция рецептора на оригинал носит название-изображения. Естественным при этом является выполнение требования информационной эквивалентности изображения оригиналу. При промежуточных преобразованиях происхо,аит фильтрация заключающаяся, не только в уменьщении влияния щумов, но и в. 1 ... 25 26 27 28 29 30 31 ... 44 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |