


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 23 24 25 26 27 28 29 ... 44 (рис. 14.17). На экран одновременно проектируются линии, опре--деляющие зону допуска, -и контур контролируемого изделия. В зависимости от количества импульсов, получаемых при пересечении контура изделия, и линий, разделяющих зоны допусков, можно су-.дить о состоянии контролируемого изделия. Так, при сканировании :по направлению /-/ (рис. 14.17) будет получено два и один им-1пульс, говорящие, что слева изделие находится в допуске, а справа-больше допуска ( много ), по направлению - внизу - два импульса ( норма ), вверху - три импульса ( мало ). Вместо линейного сканирующего луча может быть использована следящая развертка по контуру контролируемого изделия. Применение сканирующей развертки позволяет несколько уменьшить -суммарную погрешность контроля. Имеются установки, позволяющие контролировать геометрические размеры изделия с нескольких сторон одновременно. 114.4. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ С ОБЩЕЙ ОБРАЗЦОВОЙ ВЕЛИЧИНОЙ Резкими допускового контроля и измерения В САК с общей образцовой величиной каждая из измерительных цепей, включая датчик, связана со своим каналом контроля, а с помощью общей образцовой величины могут быть заданы уставки или сформирована компенсационная величина, необходимая для измерения контролируемых величин. При измерении контролируемых величин система работает по алгоритму мультиплицированной измерительной системы [14.3]. Если контролируемые величины имеют относительно небольшую .дисперсию, то может оказаться целесообразным использовать измерение и производить контроль, оперируя с разностью между реализовавшимися и номинальными значениями контролируемых величин. Допусковый контроль в таких системах может выполняться по-разному. В зависимости от типа каналов контроля [<1(Х, С)> или <1(Х, С)>] формируется одновременно или поочередно нужное количество уставок, которые подключаются на устройства сравнения ©сех каналов контроля. Укрупненный алгоритм выполнения процедур контроля и измерения величин, вышедших за пределы нормального состояния, будет иметь вид [для <1(, 0>] Ф {В) I[с,IIC2II (xoi/xi) II...II (Xd /x ) ] X X{[<I(a:i,1ci; Сг)) (>{x,N)X Xl(R:xieA/S;Dl)]!...X X...II[<I(: ,lci; C2)> со(ПпеЛ7)Х XI(R:-v elS:Dn)]} ф(/=0)Х X ЬФ(/:=/+!) I(/Axk)X X{[I(CR-Xb/Ахк)Х Ххо(л,=/Ахк; xiN) I(W: Dj; Di)]\\ ... X X...III(CR:x ; /Ахк)Х Хсо(х„=/Дхк; XnN) I(W:D/; Dn)]}X X6)(/=m) 1Ф(Е). Здесь m - количество делений Ахк - компенсационной величины. Важно отметить, что в данной системе выполнение операций сравнения при контроле и измерении может производиться устройствами сравнения каналов контроля. Ввиду одновременной, параллельной работы всех каналов результаты контроля могут быть получены за один такт, а измерения - за число тактов, равное выбранному количеству делений шкалы. Если использовать алгоритм оценки разности контролируемых величин и номинального значения, то время, затрачиваемое здесь на измерение, может быть существенно уменьшено. Систему можно существенно упростить, если оставить по одному устройству сравнения в каждом канале и использовать режим последовательного сравнения контролируемых величин с уставками. Можно считать, что в этом случае используется мультиплицированная измерительная система, дополненная блоками принятия решения при контроле и отображения контрольной информации. Общее время контроля и измерения при этом увеличивается незначительно- на количество тактов, необходимых для последовательного выполнения операций контроля по нескольким уставкам. Алгоритм работы системы при допусковом контроле по двум уставкам и при отображении и регистрации величин, вышедших за пределы нормального состояния, может быть представлен б следующем виде: 1{Х, Ci){[<I(CH:Xb Ci)>:=X XI(CR:Xi, ci) I(S:xiCilxi<c,)] ... X Х...1<1(СН:д: , с,) 1{Х, С2)Х Х[<1(СН:д:ь Сг) >11.. .Щ (СН : лг, С2)]Х % X{oi(XiN) [liR:XiN)\\X X\\Oixifzi)]...X Х...\\ы{ХпЩ [I (R : Xn&V) I! X Х1Ф(п/~-.)]}. . В таких системах можно одновременно выполнять операции контроля и измерения, изменяя образцовую величину в пределах за!данной зоны и регистрируя величины, входящие в эту зону, и соответствующие им известные значения образцовой величины. При таком режиме каждый канал контроля существенно упрощается, так как в нем могут отсутствовать решающее устройст- 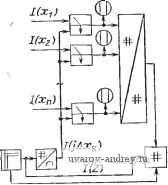 I(N\N} BO, устройство формирования уставок, может быть использовано только одно устройство сравнения, определяющее равенство контролируемой и образцовой величин. В некоторых случаях, например при приближении контролируемых величин к опасной зоне, полезно изменять образцовую величину несколько шире заданной зоны, для того чтобы выявить контролируемые величины, которые находятся вблизи от границ зоны. На структурной схеме такой системы (рис. 14.18) после устройств сравнения показаны индивидуальные сигнализаторы и преобразователь кодов. На циф-ропечатающем устройстве в случае срабатывания у1стройства сравнения регистрируются значение Zi и номер канала, отмечается нахождение Хг в нормальном состоянии или выход из него, при необходимости отмечается исследуемая зона (положим, N). Пусть нужно произвести оценку нахождения контролируемых величин в зоне 20/:25. Тогда алгоритм работы будет следующий: Ф (В) ф (/= 19) L Ф (/ : =/+1) {I (/Ал:к) II [<1,> : ==-- X XI ((л:1) I (CR : Хи jAx) со (х,=jAXk) I (R : xN) X Xl(W :гь В1)]...<1 >}<о(/=25)1Ф(Е). Рис. 14.18. Структурная схема системы спорадического контроля   01 А Рис. 14.19. Структурная схема МЦК Центротехника При необходимости можно подсчитать количество контролируемых величин, вошедших по своим размерам в исследуемую зону. Очевидно, имеется возможность произвести аналогичный анализ в нескольких зонах. При необходимости выполнения контроля на относительно больших расстояниях может оказаться эффективной реализация управления формированием образцовой величины с помощью циркуляции кодов [14.3]. На рис. 14.19 показано, что на входы устройства сравнения подаются разности контролируемых величин и номинального значения. Это может позволить пользоваться относительно небольшим числом разрядов (5-6 двоичных разрядов). Можно предполагать, что применение САК с общей образцовой величиной будет расширяться. Режимы спорадического контроля В большинстве САК оператор имеет возможность наблюдать одновременно за состоянием контролируемых величин по результатам допускового контроля, отражаемым на панели сигнализации, мнемосхеме или на экране дисплея. Однако такое представление о состоянии контролируемых величин недостаточно для того, чтобы судить о степени их близости к интересующему оператора состоянию. Для прогнозирования последующего состояния объекта или принятия решения по управлению оператор вынужден использовать результаты измерений, обычно выполняемых периодически, по вызову или при отклонении величин от нормального состояния. Несмотря на меры, принимаемые в САК для облегчения обзора результатов измерения, оператор должен затрачивать определенное время на восприятие результатов измерения контролируемых величин. В Институте проблем управления АН СССР были предложены системы спорадического контроля [14.4] (можно, впрочем, говорить не только о системах, но и режимах спорадического контроля, которые могут быть использованы в различных по принципу действия системах допускового контроля). В отличие от остальных контрольно-измерительных систем с неизменяющимися в процессе контроля уставками в режиме спорадического контроля оценку размера всех контролируемых величин предлагается производить одновременно, изменяя единую компенсирующую величину, уставку или запрашивающее воздействие. Это изменение компенсирующей величины оператор производит по своему усмотрению, от случая к случаю, - спорадически, единично. Результаты сравнения компенсационной величины с реализациями контролируемых величин отображаются на коллективном З'стройстве сигнализации. Если оператор знает, какое запрашивающее воздействие им подано в систему, то он может с помощью сигнализаторов оценить значение каждой контролируемой величины. В принципе. изменяя запрашивающие воздействия по определенным законам, можно реализовать методы развертывающего и поразрядного уравновешивания. Более важной является возможность имитировать, например, аварийную ситуацию и оценивать степень близости к ней состояния объекта контроля одновременно по всем величинам, изменяя запрашивающее воздействие на все контролируемые величины. Спорадический режим контроля может быть реализован практически в любой САК- Для САК параллельного действия в этом режиме необходимо обеспечить ввод общей компенсационной величины и работу каналов контроля в режиме сравнения этой величины с контролируемой: {[Ф(Хк/) I (Хк/)] III (Z)}{[<!,>:= I (CR : Хь х.,) X Хсо(д:,>д;кз) I(R : D/)]ll.. .<1 >}. Проще всего режим спорадического контроля реализовать в САК с общей образцовой величиной. В большинстве случаев нет необходимости изменять запрашивающее воздействие в широких пределах. В частности, возможно его изменение в пределах от номинального значения параметра до его аварийного значения. В этом случае можно про-градуировать запрашивающее воздействие в процентах от разности между аварийным и номинальным значениями величины. Изменяющаяся компенсационная величина может быть введена в устройства сравнения вместо уставки в аналоговые или цифровые каналы контроля. Выносные каналы контроля, находящиеся непосредственно у объекта контроля и имеющие ввод компенсирующей величины, авторы изобретения назвали преоб-разователями спорадического контроля (ИСК)- Системы контроля с использованием ИСК, по существу, являются системами с переменной образцовой величиной. На рис. 14.20 показана простейшая система с параллельным включением ПСК, а на рис. 14.21 - система с временным разделением каналов и цифровым измерением. Соотношение частот / и f/n таково, что на каждой ступени компенсационного напряжения происходит опрос всех ПСК- При появлении сигнала на выходе ПСК открывается соответствующий ключ и число из. счетчика переписывается в ячейку памяти и отображается на цифровом индикаторе. В момент цифрового измерения запрашивающее воздействие должно быть равно нулю. В этой системе существенно облегчены требования к коммутаторам и к линиям связи, что позволяет использовать такие системы при относительно больших расстояниях от объекта контроля. В целях повышения надежности работы САК в. режиме спорадического контроля имеется возможность периодически сравнивать контролируемые величины с уставкой, определяющей пре-ельно допустимые значения этих величин. Если в режиме спо- радического контроля какая-лиОо из контролируемых величин выйдет за эту уставку, выдается аварийный сигнал. Анализ работы человека-оператора показал, что при спорадическом представлении информации в 2-5 раз уменьшается время оценки ситуации и в несколько раз - число ошибок по сравнению с традиционным представлением информации на цифровых индикаторах. Рис. 14.20. САК с параллельным включением преобразователей спорадического контроля 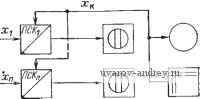   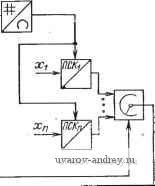 Рис. 14.21. САК с преобразователями спорадического контроля 14.5. ОСНОВНЫЕ АЛГОРИТМЫ РАБОТЫ СИСТЕМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ Контролируемые величины многих объектов контроля - непрерывные функции времени. Если допустимое изменение одной из таких величин проиеходит за время /, а на выполнение операции контроля данной величины затрачивается время Д^, то в течение t- Д^ могут выполняться операции контроля других контролируемых величин. В предыдущей главе были получены количественные оценки временных соотношений при таком дискретном контроле. Здесь же нужно остановиться на основных структурах и алгоритмах работы систем дискретного контроля параллельно-последовательного действия. В таких системах для контроля величин х\, xz, .. .,Хп используются параллельно включенные измерительные цепи с датчиками и один последовательно используемый канал конт роля. Как это отмечалось для измерительных систем, при таком включении датчиков достигается уменьшение влияния их инер-ЦкЮнности на суммарное время получения результатов измерения или контроля. Поскольку измерительные цепи с коммутаторами в измерительных и контрольных системах аналогичны и рассмотрены ранее, то здесь достаточно указать лишь на необходимость учета особенностей эксплуатации таких цепей при контроле. К таким особенностям нужно отнести в первую очередь наличие интенсивных промышленных помех и большую продолжительность эксплуатации САК- При дальнейшем рассмотрении принимается, что имеется разработанная измерительная часть, содержащая датчики, измерительные цепи, одно- или двухступенчатые коммутаторы, индивидуальные или групповые унифицирующие преобразователи для аналоговых систем контроля и включающая кроме перечисленных функциональных элементов также и аналого-цифровые преобразователи для цифровых систем контроля. Аналоговая САК будет содержать помимо указанной измерительной части аналоговый канал контроля (рис. 14.22). Но в отличие от канала контроля одной величины здесь в большинстве случаев необходимо обеспечить отображение результатов контроля всех величин. Для этого часто используются обращен- 01   Рис. 14.22. Аналоговая САК параллельно-последовательного действия 5 Т Рис. 14.23. САК с индивидуальными сигнализаторами ный коммутатор и набор индивидуальных сигнализаторов (рис. 14.23). Этот коммутатор синхронизируется со входным коммутатором таким образом, чтобы результат контроля величины Xl отображался на t-м сигнализаторе. Режим коммутации контролируемых величин и отображения результатов контроля в этой системе задается устройством управления. Дополнение системы показывающим и самопишущим аналоговыми приборами может позволить выполнение измерений по вызову оператора и аналоговую регистрацию контролируемых величин. Обычно САК с аналоговым каналом контроля разрабатываются для конкрет- ных объектов и компонуются преимущественно из функциональных узлов, выпускаемых промышленностью. В контрольно-измерительных системах каналы контроля и измерения могут быть подключены к одному (рис. 14.24) и к различным коммутаторам (рис. 14.25). 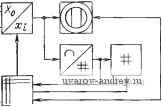 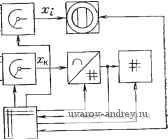 IrifCfj.-xiniKzoJ Рис. 14.24. САК с раздельными коммутаторами каналов контроля и измерения J[I(CH:Xin\I(zi)] Рис. 14.25 САК с общим коммутатором каналов контроля и регулирования Алгоритм одного цикла работы централизованной контрольно-измерительной системы с аналоговым каналом контроля <1(Х, II С)> может быть представлен следующим образом: Ф(В) ф(1=1) [ 0{i:=i+l)l{Xo/Xi)<mCU : х„ \\ С)>Х Xfo {х,Ю [I (R : CUxi) НФ (xjz,) ]/(xjzi) [I (z,) X : XU{W:zu, A;,eiV)[ CO(f=n)- Ф(Е). В этом алгоритме использованы два обозначения: <I(Xo/xi)> - цепочка преобразований сигналов множества датчиков до выбранного сигнала; <1(СН : Xj, II С)> - алгоритм работы аналогового канала контроля с параллельным выполнением операций сравнения контролируемой величины Xi с уставками. Время коммутации в данном случае должно выбираться таким, чтобы успевали выполняться все процедуры контроля, измерения, регистрации и выдачи контрольной и измерительной информации. Если время коммутации будет постоянным, то оно получится избыточным для тех контролируемых величин, которые находятся в норме. Для повышения скорости работы системы можно использовать асинхронный режим работы. Для этого следует рассматриваемый алгоритм дополнить знаком выдачи сигнала на подключение следующей измерительной цепи, если Xi находится в норме: Ф(В) y(f = 0) L Ф(1: = 1 + 1)-Х I X.-<{>Ci&N)r - >(/ = я) ПФ(Е). Существенное повышение скорости работы САК можно получить за счет использования раздельной работы каналов контроля и измерения (рис. 14.25). В этом случае один из возможных алгоритмов может быть представлен следующим образом: Ф(В)у(г=:0) [ Ф(г: = /+1)<1(СН:х С)> <о(.,G/V) х X [I(R:DOI(S:DO] <о(г=1)П L*(-s: = ,+ l)X X I (/,/г,J I [W: [zi II Di W)] <о (max g П Ф (Е). Здесь коммутатор канала контроля работает со скоростью, превышающей скорость коммутатора канала измерения. После выполнения контроля всех п величин запоминаются и отображаются визуально номера контролируемых величин, отклонившихся от нормы. Затем последовательно производятся измерение и регистрация тех величин, номера которых были зафиксированы в памяти (is - порядковый номер их в ЗУ). Если не накладываются ограничения на время выполнения процедур контроля, то распространенный алгоритм в этом случае предусматривает последовательное аналого-цифровое преобразование всех контролируемых величин, занесение всех полученных значений в память, выполнение процедур цифрового контроля и регистрации значений контролируемых величин, вышедших из зоны допуска, и другие операции. Укрупненная СЛСА такого алгоритма Ф(В) <1{XJX}> [ Ф(,-: 1)1(ад 1(х,М) l{S:Zi) X Xco(/ = )\L*( -i+l) Н^д< I(CH:z DC)> co(2;GA)X XI(W:2 Di,N)w{i = nn- Числовые значения входных величин могут быть использованы для выполнения различных алгоритмов контроля. 14.6. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ Параллельно-последовательные алгоритмы допускового контроля могут быть реализованы, во-первых, в САК, создающихся потребителями для конкретных целей из соответствующих функциональных блоков и устройств их сопряжения, и, во-вторых, в универсальных системах из выпускаемых промышленностью функциональных блоков. Системы автоматического контроля, создающиеся индивидуально для определенных объектов контроля, будем называть ло- кальными системами автоматического контроля (Л САК). Структура цифровых ЛСАК по существу не отличается от локальных измерительно-вычислительных систем (ЛИВС). Соединение функциональных блоков в ЛСАК может быть осуществлено с помощью стандартных цифровых интерфейсов, а функции канала контроля и управление системой могут выполняться с помощью специализированных устройств, микропроцессорных наборов или ЭВМ. (Конечно, должна быть обеспечена программная реализация алгоритмов контроля.) Промышленностью выпускаются управляющие, вычислительные машины (УВМ) и комплексы (УВК). Под машиной понимается законченная цельная часть системы, а под комплексом - та же часть системы, полученная соединением отдельных функциональных блоков, состав которой может быть при необходимости изменен и дополнен. При присоединении к УВМ или УВК измерительных цепей, Включая установленные на объекте контроля датчики, и при обеспечении УВМ (УВК) необходимыми программами контроля образуется система, готовая для выполнения алгоритмов контроля. Если дополнительно к сказанному в системе предусмотрено управление формированием управляющих воздействий, то с помощью УВМ или УВК может быть обеспечено основное ее назначение - автоматическое управление поведением, изменением состояния объекта. По УВМ и УВК имеется обширная литература, большая часть которой посвящена рассмотрению технических средств, алгоритмов их действия, особенностей выполнения функций управления и, в меньшей мере, функций контроля. В дальнейшем рассматриваются основные типы УВМ и УВК с точки зрения использования их при допусковом контроле и с уделением особого внимания измерительной части машин и комплексов. Имеются УВМ, предназначенные для автоматического приема информации от управляемого объекта, преобразования полученной информации, сигнализации об отклонении параметров от номинальных, выдачи кодоимпульсных сигналов и информации в удобном для оператора виде, т. е. для выполнения контрольно-измерительных алгоритмов. Такие УВМ называются машинами централизованного контроля (МЦК). Этим названием подчеркивается, что сбор и преобразование контрольной и измерительной информации в МЦК производится централизованно, т. е. в последовательности, определяемой устройством управления, по одному каналу контроля и измерения. В МЦК реализуются параллельно-последовательные алгоритмы контроля. Подчеркнем, что МЦК обычно не включают в свой состав датчики и измерительные цепи к ним. Известно более сотни моделей МЦК, разработанных за рубежом и в Советском Союзе и различающихся количеством обслуживаемых контролируемых величин, метрологическими характеристиками, элементной базой и т. п. 1 ... 23 24 25 26 27 28 29 ... 44 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |