


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 22 23 24 25 26 27 28 ... 44 дежных, простых, точных п быстродействующих устройств допускового контроля продолжаются до настоящего времени. Если описание норм представлено в цифровом виде, то при большом количестве контролируемых величин значения уставок вводятся либо в автономные устройства памяти, либо в память вычислительной машины. Сопоставление уставок с контролируемыми величинами в этом случае может быть выполнено в цифровом либо в аналоговом виде. В первом случае значение контролируемой величины должно быть выражено цифровым кодом, во втором цифровое значе- 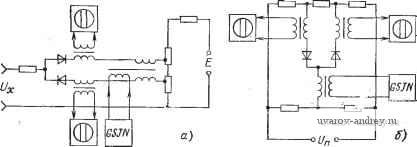 Рис. 14.4. Вентильные устройства допускового контроля: а - потенциометрическая схема; б - мостовая схема ние уставки должно быть преобразовано в аналоговую величину, однородную с контролируемой. По второму способу выполняется сравнение в системе ИВ-500 (см. § 14.6). Остановимся на сопоставлении уставки и контролируемой величины в цифровом виде. Таблица 14.1. Логические функции двоичных переменных
Следует различать аппаратурный (реализуемый с помощью логических элементов) и программный (реализуемый с помощью ЭВМ) способы сравнения кодов с получением результата сравнения в виде соотношений больше , меньше , равно или с количественной оценкой разницы кодов; сравнение кодов может 6bitb выполнено поразрядно или одновременно по всем разрядам. В. табл. 14.1 представлены значения элементарных логических функций для двухразрядных двоичных переменных А та В. Схема сравнения, выполняющая логическую функцию [(ЛоЛВо) V (АоЛВо)] Л[(Л.ЛВОV (л,лв.)] Л [И2ЛВ2)V №ЛВ2)] . .. позволяет установить равенство чисел А=В (A=AoAjA2 ..., B=BqBiB2 ...), имеющих одинаковое количество разрядов (рис. 14.5). Но при дискретном контроле такая схема не обеспечивает надежного определения состояния, в котором находится текущее значение контролируемой величины (особенно при контроле, проводимом через определенные интервалы времени).
Рис. 14.5. Схема сравнения для определения равенства двух чисел -А=Б А<В Рис. 14.6. Схема сравнения одноразрядных двоичных чисел -А>В А<В Рис. 14.7. Схема сравнения двухразрядных двоичных чисел Рассмотрим схемы, позволяющие определить соотношения между числами А и В:-А>В, А<В ипп А=В. Если А и В - одноразрядные двоичные числа, то А>В при Л=1, В=0 (А>В, А/\в); А<В при Л=0, В=1 {А<В, ЛДВ) и А = В при А=В=1 или Л=В=0 [А=В, {Аав)\/ААВ)] (рис. 14.6). Результаты сравнения двухразрядных двоичных чисел при определении состояний Л>В и А<В представлены в матричной форме (табл. 14.2). В соответствии с матрицами: для А>В (AiAoAiABo) V АЯ0Л-В1 ASo) V (Л lAloABiABo) V V (Л lAoASi ДБо) V (Л 1 АЛоАЯ1ЛВо) V (i ЛЛоДВ.ДЯо); Та блица 14.2. Сравнение двухразрядных чисел А и В ъ) А>В б) А<В
для А<В (Л 1 ЛЛсЛ51ЛВс) V (Al ЛЛсЛЙ! ЛВс) V (Л1 AoABi ЛВс) V V (Л1 AoAfi. ДВо) V (Л .лЯоЛЙ! ДВо) V (л, ДЛоДВ. ДВо>. Имеется возможность минимизации числа элементарных операций. После минимизации для А>В AiAfiiVHiVfiOAo; для А<В , В.ДЛ,У(В.УЛ,)ДВо. Этим логическим функциям соответствует схема, представленная на рис. 14.7. Для сравнения между собой чисел с количеством разрядов, превышающим два„ можно использовать пирамидальное объединение схем сравнения двухразрядных чисел. Результат сравнения двух десятичных кодов Л и В по логике равно - больше - меньше (рис. 14.8) определяется следующими логическими функциями: А<В 0A(1V2V3V V9)V1A(2V3V ... V9)V .- У8Л9;, А>В Л=В 1a0v2A(0v1*)V V9A(0v1V ... V8); (А<В)/\(А>В). Для сравнения кодов с единичным основанием могут быть использованьв разнообразные реверсивные и нереверсивные пересчетные схемы [14.1J. Сравнение нескольких кодов и выделение наибольшего двоичного кода могут быть выполнены с помощью устройства (рис. 14.9), в котором начиная ссе старшего разряда из дальнейшего сравнения исключаются коды, содержащие нулевые значения. Сопоставление кодов двух чисел, как говорилось выше, может быть также выполнено путем их вычитания и анализа разности. Поскольку операции суммирования выполнить проще, то в большинстве устройств сравнения суммируется код одного числа с дополнительным (инверсный код плюс единица в младшем-разряде) кодом другого. В сумматоре выполняется операция суммирования чи- rx X X X X X X X f
Рис. 14.8. Матричная схема сравнения двух одноразрядных десятичных чисел Рис. 14.9. Схема выделения наибольшего двоичного кода сел Л и В и переноса избыточного разряда в старший разряд (табл. 14.3), рис. 14.10). Разность чисел Л и В будет иметь положительный знак, если результат суммирования имеет избыточный разряд, и отрицательный, если результат суммирования без избытка. Таблица 14 3. Суммирование разрядов А и В
Рис. 14.10. Использование сумматора для сравнения чисел Для примера покажем, как выполняется сравнение чисел Л=64 и В=32 (индекс доп относится к дополнительному коду): А = 1000000 (64) В = 0100000 (32) В = 0100000 (.32) А = 1000000 (64) = 1100000 Лдо„ 1000000 {А + Вдое) = 10100000 ( -f 32) (В + А^огд = 1ЮОООО ( - 32) При вычитании из В числа А для получения абсолютного значения следует получить дополнительный код от (В-)-Лдоп). Необходимо отметить, что существенное упрощение устройства сравнения достигается при представлении результатов контроля по способу представления допусков относительно номинального значения (рис 14.11). В этом случае устройстВ'О сравнения оценивает лишь соотношения между АА, ДЛе, ДЛн. ~AA>AAg -ЛАц<АА<ЛАв Рис. 14.11. Схема сравнения АЛ с допусками -АА<АА Можно проследить сходство между способами аналого-цифрового преобразования. При реализации их выполняются операции сравнения аналоговых величин, одна из которых, компенсационная, эквивалентна известному коду, и сравнения кодов. И в том и в другом случаях выполняется ряд операций сравнения в целях получения соотношений по логике больше - меньше - равно между величинами. Поразрядное и одновременное по всем разрядам сравнение, нереверсивный и реверсивный счет двух чисел, представленных в коде с единичным основанием, имеют аналоги в аналого-цифровом преобразовании. 14.3. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАЛЛЕЛЬНОГО И ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ В этой главе рассматриваются системы допускового контроля, которые предназначены для определения состояния величин Х= =Xi, Х2, . .., Xi, . . ., Хп, заданного в виде зон, выделяемых уставка- ми. Конечная цель контроля - дать количественное суждение о том, находится состояние каждой контролируемой величины или объекта контроля в норме или нет, т. е. выдать информацию l{XiN) или l{XiN),l{XN) или 1{XN). Алгоритмы работы допусковых САК отличаются друг от друга, в первую очередь, по последовательности выполнения операций контроля. В соответствии с этим различаются допусковые САК параллельного, последовательного и последовательно-параллельного действия. -о о о Рис. 14.12. Структурная схема многоканальной САК Рис. 14.13. Аналоговый канал контроля с выдачей результатов контроля, измерения и сигналов управления  Рис. 14.14. Цифровая САК парал дельного действия с последовательным выводом результатов контроля и измерения Системы автоматического допускового контроля параллельного действия, или многоканальные САК, состоят из параллельно (одновременно) работающих каналов контроля (рис. 14.12). Каждый канал контроля в таких системах работает независимо от других каналов и выполняет функции допускового контроля одной контролируемой величины. Современные САК параллельного действия весьма часто позволяют выдавать одновременно с результатами контроля измерительную информацию как в аналоговом (рис. 14.13), так и в цифровом (рис. 14.14) видах, а также сигналы, необходимые для формирования воздействия на объект контроля, например, в целях регулирования. Последовательный вывод результатов контроля и измерения позволяет связать систему с ЭВМ, системой управления, с общим для всех каналов запоминающим или регистрирующим устройством. Рассматриваемым САК присущи достоинства и недостатки ИИС параллельного действия: работа с разнообразными контролируемыми величинами, возможность получения повышенного быстродействия, структурная простота и повышенная надежность системы, определяемые независимостью работы всех каналов контроля, использование относительно простых и выпускаемых промышленностью устройств каналов контроля. Вместе с тем многоканальные САК характеризуются наибольшим количеством элементов, входящих в систему. Многоканальные САК широко используются при управлении технологическими процессами во многих отраслях промышленности, при эксплуатации динамических объектов и т. п. Устройствами каналов контроля служат выпускаемые промышленностью автоматические мосты и потенциометры с устройствами сигнализации, приборы унифицированного комплекса аналоговых устройств общепромышленного назначения с компараторами, щитовые цифровые приборы с устройствами сопряжения их с цифровыми печатающими устройствами, формирования уставок и сравнения их со значениями контролируемых величин. Указанные устройства имеют достаточно большой удельный вес среди электроизмерительных приборов, входящих в продукцию АСЭТ ГСП (см. гл. 3). Это позволяет утверждать, что во многих практически важных случаях удается создавать такие системы путем компоновки из готовых, выпускаемых промышленностью устройств. Многоканальные САК могут оказаться экономически более выгодными при относительно небольшом количестве контролируемых величин, особенно если эти величины разнородны по физической природе. Во всяком случае, при выборе готовых или проектировании новых САК вариант использования или реализации многоканальной системы должен приниматься во внимание. В САК последовательного действия (их также называют сканирующими САК) контролируется состояние величины (например, температуры, перемещения или освещенности какого-либо предмета), распределенной в одно-, двух- или трехмерном пространстве. Кроме того, в этой ситуации могут контролироваться функции (положим, интегральные) от входной величины. Если контролируемые величины - дискреты входной исходной величины, то координаты точек пространства, в которых должны производиться операции тонтроля, выбираются аналогично тому, как выбираются интервалы контроля по времени при дискретном контроле. Нормы здесь могут быть в наиболее простом виде общими для всех дискрет или для нескольких дискрет, а также индивидуальными для каждой дискреты входной величины. При индивидуальном задании нормы должны сопровождаться указанием соответствующих координат точек. Каналы дискретного контроля в сканирующих САК помимо-основных функций должны обеспечивать перемещение зоны восприятия сканирующего датчика в заданную точку пространства. Система автоматического контроля управлять последовательностью выполнения операций контроля. Если для задания контролируемой величины достаточно указать две координаты и если в системе используется цифровой канал контроля с последовательным сравнением контролируемой величины с уставками, то алгоритм сканирующей системы можно-представить следующим образом: 1Ф1(. hm)\ 1(x,)<I(d;, DC)>X Xl[S:x,G(yV)] co(fe = K)-l... Кроме дискретного контроля в сканирующих САК может быть реализован непрерывный контроль, при котором сканирующее движение датчика позволяет определить места, где контролируемая-величина выходит за пределы установленной нормы, а затем измеряются координаты этой контролируемой величины. Для выполнения непрерывного контроля в первую очередь рационально использовать аналоговый канал непрерывного контроля, оператор которого имеет вид <1(Х, ЦС)). СЛСА для системы непрерывного контроля может быть таким: Ф(В) L Ф(. k) 4xt)<l{X, \\С)> со(А;,еА/)Х X \ WuiiA\hilhi)X X I(W:D/ , DU П Ф[уаг(/,ь П ... В этом алгоритме предусматривается сканирующее перемещение датчика var(/ii-, hi), непрерывное выполнение операций контроля, а в случае выхода контролируемой величины за пределы нормы - аналого-цифровое преобразование и запись этих координат. При непрерывном (адаптивном) контроле, так же как и при адаптивной дискретизации при измерении, выдаются результаты контроля в заранее не обусловленной точке пространства. Видимо, дополнительного сжатия контрольной информации при этом неполучается (по сравнению с дискретным контролем). Здесь можно говорить об уменьшении общего объема используемой информации из-за устранения при непрерывном контроле информации о координатах контролируемых величин, не вышедших за допустимые-границы, а также о возможности повышения надежности контроля-путем непрерывного наблюдения за состоянием контролируемой: величины Частным, но довольно широко распространенным типом САК последовательного действия являются сканирующие САК для кон- троля геометрической формы и размеров разнообразных объектов (например, механических деталей). Контролируемыми величинами в этом случае являются геометрические размеры объекта контроля в заданных направлениях. Описания границ нормы при этом могут быть заданы в виде зон допустимых значений табличным способом .пибо образцового предмета, а также линий допускаемых отклонений от его размеров. :х ТД G/ I-jn I I Рис. 14.15. Структурная схема цифровой сканирующей САК Остановимся на алгоритмах и структурах САК геометрических размеров с помощью телевизионного сканирующего устройства [14.2]. В телевизионном устройстве форма и размеры объекта контроля преобразуются в соответствующий рельеф электронного потенциала на светочувствительном слое оптико-электронного преобразователя, например видикона. Исходный размер х связан с размером на светочувствительном слое х* через отношение расстояния L между объектом контроля и преобразователем к фокусному юасстоянию F используемого оптического преобразователя xxL/F. На рис. 14.15 представлена структурная схема цифровой САК, в которой для измерения используется времяимпульсный метод измерения <1(х/2:)>, описываемый алгоритмом ЦхДГ) [1(х /0111(Л^(0)] со(х*0 1(2*), где N{t) -число импульсов, поступившее за время t. В этом алгоритме может быть предусмотрена компенсация нелинейности преобразования телевизионного устройства путем функционального преобразования 1(Л/(0]. Далее реализуется а.чгоритм <1 (DX, DC)> для каждой контролируемой величины и конечное суждение о состоянии обьекта контроля выдается после оценки результатов контроля всех контролируемых величин: LФ(г :=-t+l) l{X!xi) <1(л:<М)>Х X<I(DX, DC)> co(t=n) П X ХоЛ-ib XiNz, A; e/V )X XI(R: XN). В этом алгоритме решающее устройство выдает суждение о том, что геометрические размеры объекта контроля находятся в норме, если контроль всех составляющих дал такой же результат. Однако получение погрешностей измерения меньше ±1% при реализации этого алгоритма труднодостижимо. Для повышения точности в таких системах применяется, во-первых, как это делается в измерительных системах, введение одновременно с контролируемой величиной линейных единичных мер в виде штрихов (дО 15 100 линий на 1 см) или калиброванных волокон (диаметром' порядка 10-20 мкм) и счет количества единичных мер укладывающихся в измеряемый размер, а во-вторых, измерение отклонения размера от номинального значения. Рис. 14.16. Контроль отклонения геометрических размеров от нормы: а ~~ раздвоенное изображение детали; б- сравнение с уставками Рис. 14.17. К сравнению размеров контролируемого изделия с зоной допуска, показанной пунктирными' линиями Введение мер позволяет избавиться от погрешностей, связанных с искажениями при преобразовании геометрических размеров в оптоэлектронном устройстве, так как при таких измерениях применяется метод совпадения контролируемых величин и набора образцовых мер с получением результата измерения последовательным счетом. Однако в подобного рода телевизионных системах не удается полностью использовать разрешающую способность штриховых мер ввиду ограниченных возможностей получения достаточно высокого отношения полезного сигнала к шуму. Измерение отклонения контролируемого размера от номинального его значения может резко повысить точность измерения, особенно при больших отношениях номинального значения к отклонению от него. В некоторых случаях выделение отклонения достигается при использовании соответствующих оптических преобразований. Например, на рис. 14.16,а изображение относительно небольшой по размеру L контролируемой детали раздваивается на известное расстояние Lq, затем сравнивается с допусками Lo-L, а не L. На рис. 14.16,6 уставки Ci и Сг установлены относительно номинального значения Lh контролируемого размера. С этими уставками сравнивается разность AU=L-Lh. Используя указанные пути, удается выполнить контроль диаметра тонкой проволоки (от 20 до 100 мкм, погрешность измерений меньше ±1,57о), ширины металлической полосы, нагретой до 1000 °С и движущейся со скоростью до 2,5 м/с, с погрешностью-меньше dzO,4% и т. п. При массовом контроле изделий сложной формы используется сравнение контуров контролируемого изделия и зоны допуска 1 ... 22 23 24 25 26 27 28 ... 44 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |