


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 17 18 19 20 21 22 23 ... 44 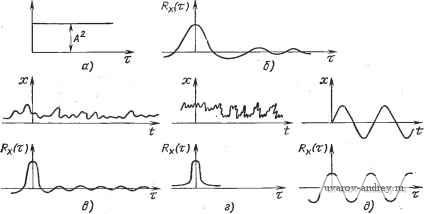 Рис. 12.12. Виды корреляционных функций о - постоянной величины; б - случайной иеличины с относительно большим интервалом корреляции е, г --то же, ио с меньшим по сравчению с предыдущим случаем интервалом корреляции; д - синусоидальной величины КО формально можно трактовать как случайные процессы. Их используют обычно для проверки коррелометроз. В прикладном корреляционном анализе довольно часто используется понятие интервала корреляции. Под интервалом корреляции понимается значение аргумента корреляционной функции to, при котором корреляционная функция не превышает некоторого заранее заданного значения е: I рх (т) I <8 для Т>То. Используются также определения интервала корреляции через интегральное значение корреляционной функции: .о \е для c>V; J РА:()<е ДЛЯ = = Выбор того или иного выражения для интервала корреляции определяется характером прикладных задач. Так, например, интервал корреляции то используется при оценках математического ожидания случайных процессов, то -при определении шага квантования по времени непрерывных реализаций при осциллирующих корреляционных функциях. То - при оценке эффективности оценок корреляционных функций. Методические погрешности корреляционных измерений весьма подробно рассмотрены в литературе [12.7, 12.8]. Остановимся лишь на тех результатах исследования этих погрешностей, которые необходимы для организации экспериментального определения корреляционных функций. Погрешность от влияния квантования исследуемой величины по амплитуде оказывается незначительной при относительно невысоких требованиях к точности измерения мгновенных значений. Положим, при квантовании случайного процесса образуется шум квантования n{t). Квантованное по амплитуде мгновенное значение случайного процесса будет равно: xAt)x{t)-]-Mx-\-n(i). В этом случае Rx (-) = М [X,(t) х„(t -f .)] М [1сit) -f х)4- x{t)Мх-ь -f х {() я 4- 1) -f Мхх [t -f- г) -L М'х -Ь Мхп + ) + . fО X X к (/ -f г) + МхП (t)+ п (t) п {t -Ь т)]. Если квантователь имеет шумы квантования с нулевым математическим ожиданием, то M[M;fn(/+t)J=0; 7W[Mx (0]=0. Кроме того, Л1[х(0ад=0 и M{Mxx(t-\-%)]=(). Тогда Rx, = Rx {-) + М\ -У Rxn (-) + Rnx (-) -г Rn {-) При интервалах квантования Ах<Хтах можно полагать шум равномерно распределенным, интенсивность шума квантования М[ 2] = /? (0) = (Дл:)712- (т). При Ал:/0<1 взаимная корреляция шума квантования и сигнала x{t) практически может не учитываться. Следовательно, Rx,{:)Rx{:)-\-Mx+{x)/l2. Если не вводить поправку на Rn{x), то оказывается, что относительная погрешность б из-за квантования сигнала по уровню даже при незначительном количестве квантов т имеет небольшое значение. Так, при т = 4 б 20%; т=8 85%, при т=16 6=1,2%, при 7=32 6 = 0,3%, при т = 64 6=0,09%. На практике в целях уменьшения влияния возможных отклонений математического ожидания и плотности распределения шума квантования от расчетных значений обычно применяют АЦП имеющие от 16 до 64 делений. При определении оценок корреляционной функции важно учитывать погрешности, обусловленные кснечным временем Т реализации или числом дискрет N случайной последовательности. При проектировании корреляционных ИС приходится решать также задачу определения Т или (V при заданной погрешности. Эта задача может решаться по-разному в зависимости от полноты априорной информации о виде корреляционной функции, которая должна быть получена в результате измерения. Положим, известна нижняя частота ю„ гармонических колебаний спектра корреляционной функции. Тогда j 12-8], если ограничиться временем реализации 2Т, W -cos т - cos со т [Rx (.)]. При заданной погрешности 6t[/?jc(t)J можно определить Т: Так, например, при бт[?х(т)]=0,02 /Ст>8. Для эргодического стационарного случайного процесса с нормальным законом распределения и нулевым математическим ожиданием при некоррелированной выборке значений анализируемого процесса может [12.2] использоваться следующее выражение: D {R*x(-z)\ 1 ---о р = Если объем выборки ограничивается техническими характеристиками аппаратуры, то можно усреднить результаты измерения, полученные на отдельных участках, и тем самым уменьшить 6(т). Более подробно эти вопросы рассмотрены в [12.2, 12.4, 12.7, 12.8]. Интервалы квантования Ат корреляционной функции по аргументу выбираются в зависимости от допустимой погрешности восстановления корреляционной функции. На практике при восстановлении корреляционной функции весьма часто используются полиномы невысокой степени (в большинстве случаев - первой). При линейной аппроксимации и известном значении максимума модуля второй производной IМ I корреляционной функции имеем LYS\I\M \. Если р;,(т) = е- то Ах = (1/р)]/88;. При Рл: (mfiJ ~ 0,05, т: д; = 3/р количество дискрет нормированной корре. ляционной функции я - З/j/ 88р -- 1. Принимая 5р = 0,02, получаем я = 9. Обычно для восстановления Rx*(x) с погрешностью около 1 - 2% достаточно на отрезке самой высокочастотной составляющей корреляционной функции взять примерно 10 дискрет, для монотонной по характеру корреляционной функции достаточно взять 10- 15 интервалов Дт, для затухающей по гармоническому закону функции - 30-40 интервалов, для двухчастотных функций - около 100 интервалов и т. п. Наиболее существенные результаты по анализу аппаратурных погрешностей корреляционных ИС получены в [12.1, 12.2, 12.7]. Остановимся кратко на рекомендациях, полученных в результате этого анализа. В корреляционных ИС даже значительные внешние влияния, если они не коррелированы с исследуемыми процессами. мало сказываются на результатах измерений. В то же время небольшой дрейф характеристик или возникновение помех, коррелированных с x{t), может вызвать появление значительных погрешностей. Степень влияния помех и погрешностей существенно зависит от места их возникновения в системе. В частности, центрирование случайных величин целесообразно выполнять на входе, а не на выходе ИС. Точность корреляционных ИС во многом определяется их принципом действия. Цифровые ИС имеют в этом смысле большие преимущества, при этом их сложность относительно невелика. Следует выделить два основных метода построения корреляционных ИС. Первый из них связан с измерением коэффициентов корреляции и последующим восстановлением всей корреляционной функции, второй - с измерением коэффициентов многочленов, аппроксимирующих корреляционную функцию. По каждому из этих методов система может действовать последовательно или параллельно, работать с аналоговыми или кодоимпульсными сигналами, в реальном времени или с изменением скорости и т. п. Корреляционные ИС с последовательным измерением коэффициентов корреляции Рассмотрим методы построения систем, в которых выполняются прямые (некомпенсационные) измерения коэффициентов корреляции. Среди них наиболее распространен метод умножения. При его реализации используются формулы т ?*х() = Гх(0(+-)й; о г при фиксированных значениях аргумента Мт, k=0, 1, 2 ... На рис. 12.13 и 12.14 показаны схемы аппаратной реализации для измерения коэффициентов корреляции корреляционной и взаимно корреляционной функций. Поскольку метод умножения применим для корреляционного анализа любых стационарных случайных процессов, то большинство корреляционных ИС построено на его основе. Имеются решения, позволяющие избежать операции умножения. Они связаны в большинстве случаев с заменой умножения возведением в квадрат суммы значений х и х (t+x). Для стационарных случайных процессов M[x(l)+x{t+r)y = 2DxU+px{x)]; . M{[x{t}+x{t+T)V-[x{t)-x(t+rm = =M[4x\t)x\t+T)]==4Rx{T). Нужно, однако, заметить, что коррелометры, основанные на таком принципе действия, не имеют преимуществ по точности перед коррелометрами с умножением, а выигрыш по простоте реализации сомнителен. x{t)xaft) 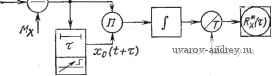 Рис. 12.13. Схема, реализующая метод умножения при измерении дискрет корреляционной функции x(t) Xo(t) 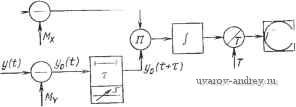 Рис. 12.14. Схема, реа-fxrWl лизующая метод умножения при измерении взаимно корреляционной функции Коррелометры, построенные по полярному методу (методу зна-косочетаний) [12.8], являются наиболее простыми, но они применяются для анализа центрированных нормальных стационарных случайных процессов. Двумерная плотность распределения нормального случайного процесса 27xo]/l-f=(x) ехр - 2xiX2?(c) -f Х^а 2oM1-pV=)] где xi==a:(0; 2=-<(+)) определяются значениями нормированной корреляционной функции. Следовательно, если найти совместную вероятность некоторых значений х{1) и х(+т) [или г/(+т)], то можно определить рх(т). Наиболее просто находятся вероятности совпадения (или несовпадения) знаков случайных процессов (рис. 12.15), сдвинутых относительно друг друга на интервал т [12.2]: Р++ (t) =Р- (т) (1 / 2л) arccos [-р (т) ]. Отсюда р (т) =-cos 2я [р++ (т) ]. Структурная схема полярного коррелометра относительно проста (рис. 12,16). Однако необходимо принимать меры по обеспечению одинаковых частотно-фазовых характеристик каналов, исключению связи между ними, уменьшению дрейфа нуля во входных цепях и т. д. Выпускаемый серийный полярный коррелометр КА-ЗД имеет погрешность не более 10%, частотный диапазон от 50 до 20 ООО Гц и динамический диапазон сигналов 100 мкВ - 3 В. При релейном методе используются формулы Гх () =М[х (/) sign X {t -{-.)] = Vh °хРх (-t); Rx. Y (т:) = М [К (t) sign y{t-]- 1)]= y2jiz OxPx. Y (=) Коррелометры, основанные на релейном методе ( значение - знак ), обладают более высокой точностью по сравнению с полярным коррелометром и приближаются в этом смысле к коррелометрам, основанным на методе умножения. Следует отметить, что при релейном методе объем выборки увеличивается примерно в 2 раза по сравнению с методом значение - значение и определяется из следующего выражения: бр=(1/Л^нк) {[jxV4px(t)] - 1},. где Л'нк - количество некоррелированных значений исход'юй функции. Имеются исследования, направленные на повышснпе точности полярного и релейного методов путем введения вспо.\.игательных-случайных сигналов и т. п. При измерении коэффициентов корреляции с применением интеграла Стилтьеса используется аналого-цифровой принцип построения коррелометров в соот- ветствии с выражением Рис. 12.15. К определению совпадения о в знаков x{t) и x(i-)-T) О I X, sign X 
Рис. 12.16. Схема полярного коррелометра в этом случае предусматривается, что производится аналого-цифровое преобразование сигнала y{t-{-x). При равномерной шкале АЦП (A=const) можно принять, что Zy{t-{-x)=jAy. Следовательно, t, t, т /о В соответствии с этим выражением структура коррелометра (рис. 12.17) состоит из схемы переменной задержки по времени сигнала y{t), простейшего АЦП, элементов И и устройства инте- y(t) >-4 > Рис. 12.17. Схема коррелометра, основанного на использовании интеграла Стилтьеса грирования, на которое сигналы подаются с соответствующими весами, определяемыми значениями сопротивлений R. Количество элементов И равно количеству уровней квантования и обычно невелико (до 10). СЛСА для рис. 12.17 можно записать в следующем виде: <р(г, г = 0) Ф(В) \\x{t)\\y{t,-\-.)\\l\y{U-.)lz,{t-\-.)ULy\X i\y{i-\-)M-\-) = \M X >[y(-f .):5ЛДг/±Дг 2]1 S:j,J{t)dt-\-uK{t)dt ...Ф(Е). Верхние пределы некоторых интегралов отсутствуют, поскольку интегрирование х(0 по этому алгоритму производится в течение о интервалов времени, пока y{t-\-x) находится в пределе соответствующего уровня квантования с весами, определяемыми этими уровнями. Для реализации этого алгоритма следует схему на рис. 12.17 дополнить устройством, определяющим необходимость выполнения нового аналого-цифрового преобразования. Одним из наиоолее простых методов получения коэффициентов корреляции является метод диаграмм рассеяния [12.8]. Он пригоден для анализа случайных процессов, подчиняющихся нормальному закону распределения. Основан он на том, что сечения нормальной плотности распределения (при заданном т) представляют собой эллипсы, отнощение главных полуосей а и b которых определяет нормированную корреляционную функцию р^,у(т) = [1-(а/.6)2]/[1--(а/6)2]. Фигура Лиссажу, получаемая с помощью электронного осциллографа, обычно имеет размытый вид. Для измерения а и 6 выбираются линии равной яркости. Подобный метод пригоден для ориентировочной оценки значений коэффициентов корреляции. Компенсационные методы измерения коэффициентов корреляции разработаны значительно слабее. Однако известные достоинства этих методов, связанные преимущественно с возможностью исключения ряда ногрещностей, заставляют обратить внимание на те немногие попытки, которые направлены на создание компенсационных коррелометров. Первая попытка создания компенсационного коррелометра была предпринята в 1958 г. [12.10]. в компенсационном коррелометре этого типа изменяется мае- о штаб x{t) в а раз (рис. 12.18). Следовательно, на выходе вычит о о тающего звена получается сигнал а:(-1-т)-ax{t). После возведения в квадрат (Л'е) и интегрирования получается М [x{t+x) -ax{t) ] Dx [ 1 +а^-2арх (т) ]. Р1зменением а достигается минимум этого выражения. При этом учитывается, что [l-l-a-2apjf(т)]/da=0, а=рх{%). Погрешности выполнения операций возведения в квадрат и интегрирования в таком коррелометре не оказывают существенного влияния, а требования к указателю существенно упрощаются, так как определение р(т) практически не зависит от знания точного значения минимума, равного Dx\}-р^х-(т)]. Видимо, этот метод не получил широкого распространения ввиду трудностей, связанных с выполнением операций минимизации выходного сигнала, на что требуются определенные затраты времени, и ввиду зависимости уровня минимума от значения сигналов. Для независимого измерения коэффициентов корреляции можно использовать квазикомненсационную цепь, предложенную К. Б. Ка-рандеевым и Г. А. Штамбергером и изображенную на рис. 12.19. На о о устройство умножения подаются напряжения й()/2и(и ()/2)Х о y(Zv.lz) -и(-1-т), а показывающий прибор реагирует на Ш[ 2 (О z /z- (О и (-f т) ] = = [Z) Zk/Z-/? (т)], , , где k - коэффициент пропорциональности. Изменяя 2k, можно добиться нулевого показания индикатора. При этом справедливо соотношение ри (т)=гк/2. Благодаря использованию скалярных режимов измерения процесс уравновешивания измерительной цепи осуществляется весьм.а просто и может быть автоматизирован. Время проведения эксперимента практически будет определяться временем, необходимым для выполнения операции осреднения. Схема, реализующая этот принцип, успешно использовалась в аппаратуре для геодезической аэроэлектроразведки методом естественных электромагнитных полей. xft) 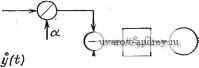 S(t) z/2 Z/Z Рис. 12.18. Схема с минимизацией выходного сигнала коррелометра Рис. 12.19. Схема компенсационного коррелометра Имеется возможность измерения с помощью такого же метода так называемых мнимых коэффициентов корреляции при использовании специальных спектральных фазосдвигающих цепей, обес- о печивающих изменение фазы каждой составляющей спектра u{f) в заданном диапазоне частот на угол зх/2 без изменения исходных амплитуд. Корреляционные ИС с параллельным и параллельно-последовательным измерением коэффициентов корреляции Преимущества и недостатки ИС параллельного действия присущи и корреляционным ИС параллельного действия. Структурные схемы аналоговой и аналого-цифровой корреляционных систем параллельного действия представлены на рис. 12.20 и 12.21. Схема аналоговой системы не требует пояснений. Аналого-цифровая корреляционная ИС, описанная в [12.2], позволяет произвести одновременное измерение 100 коэффициентов корреляции. Частота работы генератора импульсов от 100 Гц до 1 МГц, максимальное время задержки создающейся регистрами сдвига, при этом изменяется от 1 с до 100 мкс. Кодоимпульсный сигнал от АЦП поступает сначала на триггерные регистры сдвига, затем на умножающие устройства и на интегрирующие цепочки. Измерение уровней напряжений на конденсаторах производится после выполнения цикла анализа. x(t)  Рис. 12.20. Многоканальная аналоговая корреляционная ИС 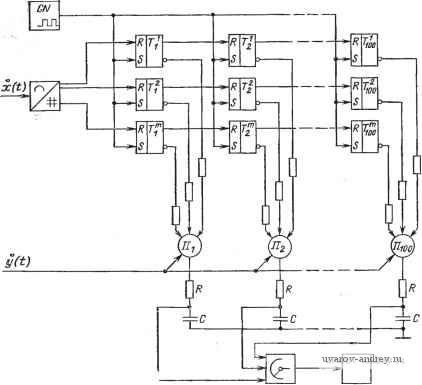 Рис. 12.21. Многоканальная аналого-цифровая корреляционная ИС В цифровых коррелометрах параллельно-последовательного действия возможно несколько вариантов структур. В большинстве случаев общими элементами информационного канала являются устройства умножения, суммирующее и ЗУ. Корреляционная функция в цифровом корреляторе при сильно 1 ... 17 18 19 20 21 22 23 ... 44 |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |