


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 11 12 13 14 15 16 17 ... 44 пульсный сигнал может передаваться параллельно или последовательно. Но и в том, и в другом случае будем считать, что информационный канал один, и, следовательно, это обстоятельство не влияет на определение количества ступеней системы. Если количество измеряемых величин велико (п>100), то находят применение двух- и, редко, трехступенчатые структуры (рис. 8.5,6, е). В ряде случаев оказывается полезным (например, в связи с уменьшением длины соединительных линий) использование магистрального соединения, обозначенного на рис. 8.5,6, в буквой М. Измерительные системы с количеством ступеней, превышающим три, встречаются относительно редко. Выбор количества ступеней в структуре определяется необходимостью обеспечить заданные быстродействие и точность, повысить надежность работы (путем резервирования), упростить эксплуатацию. Об этом говорилось в предыдущей главе. Немаловажное значение при выборе структуры имеет также возможность (при использовании двухступенчатых структур) относительно просто наращивать количество измеряемых параметров, вводя дополнительные блоки первичных коммутаторов и АЦП. На рис. 8.5 не показаны блоки управления, блоки памяти, которые необходимы в случае, если АЦЧ должна выдавать измерительную информацию не в ритме ее получения (не в реальном времени проведения измерительного эксперимента), а также другие функциональные блоки, необходимые для обеспечения работы системы. Таблица 8.4. Классификация многоточечных структур
Обобщая сказанное, можно прийти к достаточной для наших целей систематизации многоточечн.ых структур (табл. 8.4). Количество разновидностей таких структур велико, и помимо основных типов, определяемых признаками, приведенными в табл. 8.4, они различаются по видам и параметрам входных сигналов (в том числе и по виду модуляции), по типам коммутаторов, АЦП и т. п. Структура последовательного действия (сканирующие системы) В структурах последовательного действия операции получения информации выполняются последовательно во времени с помощью одного канала аналого-цифрового преобразования (см. рис. 8.1,г). 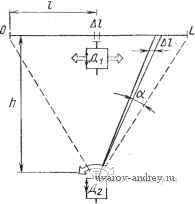 Ркс. 8.6. Измерение месторасположения точки на [О, Ц: дг - разрешающая способность датчика; L - перемещение датчика; а - yio.n сканирования; h - расстояние от датчика Д, до линии наблюдения. Варианты использования датчиков: Д| - измерение / и Д/; Дг - измерение а, /. Д'. Если измеряемая величина распределена в пространстве или объектом измерения являются собственно координаты некоторой точки или области пространства, то восприятие информации в таких структурах выполняется с помощью одного так называемого сканирующего датчика. Такие структуры носят название сканирующих. Этот тип структур входит в более общий класс информационных систем, называемых сканирующими системами [8.3] и предназначенных для воспроизведения пространственных образов на расстоянии (телевидение), для разнообразных преобразований пространственных образов в целях, например, выделения контуров, характерных точек и т. п. Сканирующие структуры могут классифицироваться по количеству измеряемых величин. Они могут выполнять операции аналого-цифрового преобразования места расположения некоторой точки (рис. 8.6) на прямой линии L, точки или кривой на плоскости или в пространстве. В качестве системы координат, конечно, могут быть использованы различные, в том числе нелинейные системы. Для выявления основных закономерностей сканирующих структур далее остановимся на прямоугольной системе координат). При исследовании параметрических полей (температур, давлений, механических напряжений и пр.) сканирующие структуры должны дать количественную оценку этих параметров в заданной системе координат. Однако не во всех случаях необходимо знать точное количественное значение величин во многих точках пространства. Иногда достаточным оказывается найти экстремум исследуемого параметра и измерить его или найти места равных значений исследуемого параметра. В сканирующих ИС в целях улучшения некоторых характеристик систем (например, быстродействия) довольно часто производится преобразование области сканирования и исследуемого параметра в промежуточную физическую величину (например, в электрический потенциал). При таком промежуточном преобра.зо-ванин могут выполняться и некоторые операции обработки (например, преобразование Фурье, дифференцирование и т. д.). Очень важной является возможность визуализации таких видов излучений, как, например, тепловые, высокочастотные элек- тромагнитные, рентгеновские. Это позволяет не только наглядно представлять распределение таких параметров в пространстве, но и использовать методы количественной оценки визуальной информации. При промежуточных преобразованиях часто оказывается полезным для снижения погрешностей измерения производить одновременное преобразование неизвестной и известной образцовой величин. Сканирующие датчики могут быть выполнены таким образом, что они при выполнении операций восприятия информации входят в непосредственный контакт с исследуемым параметром или областью сканирования либо воспринимают измеряемые величины при отсутствии непосредственного контакта ( бесконтактные датчики). Примерами контактных датчиков могут служить термопары или термометры сопротивлений, бесконтактных - радиационные пирометры. Сканирование путем перемещения контактного датчика Д1 (рис. 8.6) вдоль объекта измерения широко используется при геофизических исследованиях, в океанологических исследованиях, при изучении космического пространства и т. п. Дистанционное сканирование с помощью бесконтактных датчиков Дг с постоянным полем их восприятия применяются при телевизионных методах измерения геометрических размеров, в радиолокационных системах измерения дальности, в ультразвуковой дефектоскопии, при измерении параметров тепловых полей по инфракрасному излучению, при использовании лазеров для оценки параметров высокотемпературной плазмы (рассеяние луча при этом пропорционально температуре, а изменение интенсивности- плотности плазмы) и т. п. При выделении и измерении экстремумов измеряемых величин можно выполнять пассивное и активное сканирование. При пассивном сканировании траектория движения луча предопределена заранее и не изменяется в процессе сканирования. СЛСА сканирующей структуры при пассивном сканировании, т. е. при определенной заранее последовательности выполнения преобразования входных величин (переход i:=/), может быть представлена в виде . \ Ф{1: = 1} \{K,i)\{xJ>c )l{>cJz,) I(S:2,)1. Активное сканирование связано с изменением траектории сканирования в зависимости от информации об измеряемой величине, получаемой системой в процессе сканирования. Активные сканирующие структуры осуществляют поиск определенного значения измеряемой величины с учетом результатов пробных движений. Нахождение экстремума измеряемой величины, распределенной в пространстве и имеющей непрерывный характер, с. использованием активного сканирования позволяет резко уменьшить протяженность траектории сканирования по сравнению с длиной траектории пассивного сканирования. Когда величина х распределена в пространстве и является функцией координат пространства у\, у^,... ,Уп, то может быть реализовано несколько методов поиска ее экстремального значения. В этом случае СЛСА должна включать сбор и анализ измерительной информации в целях определения наилучшего пути к достижению заданной характерной области исследуемой величины. В общем виде при нахождении экстремального значения величины X, при котором 21 (дх/дуг) =0, производится оценка F\ll{dx/dyi)\ и принимается па основании установленного решающего правила заключение о продолжении или окончании поиска экстремума. СЛСА при активном сканировании может иметь следующий вид; установление области поиска Ф(В) [1 Ф(:=/).1МХ сбор информации по заданной программе Х[кФ(1:-1 + 1)1( ) 1(8:г,) о.(1=т)П]Х оценка близости XI (CP: Z) [F (Z) < s] П I (S: Di, Z) Ф (E). Метод, при котором сканирование происходит по направлению градиента изменения величины, называется методом градиента. Градиент изменения измеряемой величины является вектором и определяется следующим образом: п gradx:=:i; k{dxldyi), где к - единичные векторы осей координат уь В точке экстремума grad x = Q, т. е. все частные производные функции X В этой точке равны нулю. Траектория сканирования по методу градиента определяется последовательным выполнением пробных движений, анализом направления grad л: и сканирующим движением в этом направлении. Если величина х является функцией одной переменной и имеет одно экстремальное значение, при котором dx/dy-0, то направление движения к экстремуму определяется знаком текущей производной dx/dy (рис. 8.7). На рис. 8.8 показано направление сканирующего движения по методу градиента в случае поиска экстремума функции, распределенной на плоскости. 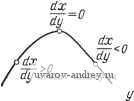 Рис. 8.7. К поиску экстремума кривой х{у) по методу градиента Рис. 8.8. К поиску экстремума поверхности x(yi, у^) по методу градиента gradxO 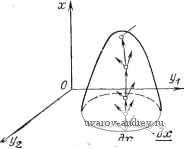 Несколько более просты в реализации, а в ряде случаев не менее эффективны методы наискорейшего спуска, Гаусса - Зей-деля и слепого поиска. При использовании метода наискорейшего спуска производятся определение значения и направления grad х в данной точке и сканирование в полученном направлении до тех пор, пока производная от X по принятому направлению не станет равной нулю. Это случится в точке касания направления движения с линией л:=const. В этой точке вновь определяется grad х и изменяется направление сканирования (рис. 8.9). Метод Гаусса - Зейделя связан со сканированием по прямоугольной координате г/, до момента дх/дуг = <д, движением по другой координате и нахождением частного экстремума х (рис. 8.10). Заметим, что этот метод используется при уравновешивании мостов переменного тока. При большом числе переменных оказывается полезным метод случайного поиска. В этом случае траектория сканирования определяется путем анализа случайных перемещений (шагов). Если 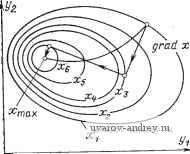 Рис. 8.9. К поиску экстремума поверхности х{уи У2) по методу наискорейшего спуска 2 тах 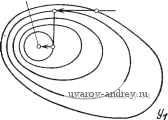 Рис. 8.10. К поиску экстремума поверхности х{у1, У2) по методу Гаусса - Зейделя при выполнении пробного шага приращение дх/ду1<0, то происходит возвращение в прежнюю точку траектории и выполняется следующее пробное движение. Аппаратурные реализации поиска экстремальных значений величин, распределенных в пространстве, разработаны для относительно простых случаев. Наиболее полно рассмотрены методы построения экстрематоров для одной величины, распределенной по участку прямой длины и по плоскости [8.4]. Следует отметить, что целесообразно во многих случаях преобразовать в сканирующей структуре пространственно распределенную величину в функцию времени и затем найти экстремальное значение этой функции. Поиск и обнаружение объектов, создающих температурное поле (например, движущихся объектов с тепловыми двигателями), можно также производить методами пассивного и активного сканирования. Последнее возможно, если температурное поле объекта находится в зоне восприятия сканирующего датчика. Если температурное поле объекта находится вне зоны восприятия дат-  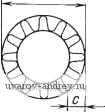 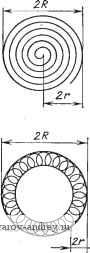 г) o),gp>a)gp д) о}гВр>1Вр Рис. 8.11. Траектории пассивного сканирования на плоскости: а - колебательно-колебательное движение; 2 - спиральное вращательно-колебательное движение; е - розеточное вращательно-колебательное движение; г - спиральное вращательно-вращательное влияние; 5 - розеточное вращательно-вращательное движение; со од, сор, иол -вр - круговые частоты и амплитуды колебательного и вращательного движений чика, то должно осуществляться пассивное сканирование пространства, в котором может находиться объект. Траектории сканирования в случае отсутствия априорных данных о вероятности нахождения объекта в пространстве должны обеспечить равномерный осмотр всего пространства. Возможны различные реализации [8.3] траектории сканирования на плоскости, показанные на рис. 8.11. Выбор вида траектории сканирования при отсутствии априорных данных определяется, как правило, простотой аппаратурной реализации сканирующего устройства. Наибольшее распространение в технике сканирующих систем имеет колебательно-колебательное движение. Наличие априорной информации о распределении вероятности нахождения объекта на площади позволяет решать задачу оптимальной организации сканирующих движений. Некоторые соображения по этому поводу имеются в [8.3]. Выше были кратко рассмотрены лишь наиболее распространенные способы организации поиска экстремумов унимодальных функций без учета случайных погрешностей измерений. В то же время реально измеряемые величины могут иметь локальные экстремумы и другие особенности (наличие оврагов , гребней и т. п.), влияющие на выбор того или иного способа поиска; при поиске должны учитываться мерность исследуемого пространства, погрешности измерений, изменения измеряемой величины во времени и другие факторы. Нужно заметить, что теория поиска находит довольно широкое приложение в ИИС. В связи с этим при изложении материала по структурам измерительных систем, системам распознавания образов и системам технической диагностики используются результаты, полученные в теории поиска. В заключение приведем табл. 8.5, <в которой сведены основные разновидности сканирующих структур. Таблица 8.5. Основные разновидности сканирующих структур
Следует заметить, что собственно операции измерения в сканирующих структурах могут выполняться различными методами. Среди них наибольшее распространение имеет, пожалуй, метод развертывающего уравновешивания. Помимо минимального количества элементов по сравнению с другими сканирующие структуры имеют преимущество, заключающееся в том, что канал измерения используется многократно. Поэтому при определенной стабильности характеристик этого канала можно с повышенной точностью производить относительные измерения величины, распределенной в пространстве. Наиболее серьезный недостаток структур последовательного действия - суммирование интервалов времени последовательно выполняемых операций измерения по всем измеряемым величинам- при применении современных быстродействующих средств восприятия информации (телевизионные датчики, оптико-электронные преобразователи и т. п.) не проявляется, и во многих случаях сканирующие структуры обладают не меньшим быстродействием, чем структуры параллельного действия. Г л а в а 9 ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫЕ КОМПЛЕКСЫ Измерительные информационные системы могут создаваться тремя основными способами. По первому способу применяются любые, в том числе и нуждающиеся в согласовании технические средства непосредственно для решения конкретной задачи. Этот способ в большинстве случаев требует больших затрат времени и денежных вложений, высокой квалификации специалистов. При втором способе ИИС строится опять-таки для решения конкретной, локальной задачи из выпускаемых промышленностью агрегатированных приборных устройств, для которых решены вопросы их информационной и, может быть, частично, конструктивной и энергетической совместимости. Объединение таких устройств в систему может производиться с помощью стандартных интерфейсов. Подавляющее большинство ИИС создается именно этим способом. Степень сложности создаваемых при этом локальных ИИС ограничивается в первую очередь квалификацией специалистов (проектировщиков, наладчиков и т. п.) и наличием достаточно представительного набора агрегатируемых функцио нальных модулей и приборных устройств, включая ЭВМ. Наконец, построение систем может производиться на базе измерительно-вычислительных комплексов (ИВК), являющихся аналого-цифровым и цифровым универсальным ядром цифровых ИИС. Измерительно-вычислительные комплексы обеспечивают выполнение аналого-цифровых измерительных преобразований, вы- Таблица 9.1. Измерительно-вычислительные комплексы
числительных процедур, выдачу полученной информации, формирование командной и иной служебной информации, необходимой для функционирования ИИС. Такое универсальное ядро формируется с помощью стандартного интерфейса из аналого-цифровых измерительных устройств широкого назначения (см. гл. 8) и программируемых средств вычислительной техники (см. гл. 6) со стандартными устройствами отображения и хранения информации (см. гл. 4). Объединение перечисленных технических средств с соответствующим операционным программным обеспечением, нужным для их совместного функционирования, и получило название измерительно-вычислительного комплекса [9.1]. Важно отметить, что для построения какой-либо конкретной ИИС необходимо дополнить ИВК датчиками, соответствующими измерительными цепями, исполнительными органами и другими
устройствами, а главное, прикладными программами, позволяющими решать задачи, поставленные перед создаваемой ИИС. Здесь уместно провести аналогию [9.1] ИВК с ИИС и управляющих вычислительных комплексов с АСУ технологическими процессами (см. гл. 14). Возможность типизации решения многих задач ИИТ путем использования, во-первых, электрических измерительных сигналов и типовых (агрегатированных, совместимых) средств электроизмерительной техники и, во-вторых, программируемых средств вычислительной техники позволило обосновать и организовать промышленный выпуск ИВК- Электроприборостроительная промышленность Советского Союза выпускает и разрабатывает около 50 типов ИВК- Они создаются методом проектной компоновки из системно-сопрягаемых функциональных блоков и устройств, выпускаемых 1 ... 11 12 13 14 15 16 17 ... 44 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |