


|
|
|
|
Главная страница » Электрика в театре » Измерительные коммутаторы амплитудно модулированных цепей 1 ... 7 8 9 10 11 12 13 ... 44 Основное соотношение Амплитудная модуляцчя (АМ) Угловая модуляция а (О - cos в (<). мгновенное злачение частоты ш = dbfdf, где ~ О Частотная модуляция (ЧМ) Фазовая модуляция (ФМ) Вид модулированного сигнала при произвольной модулирующей функции fit) Вид модулированного сигнала при f (О = = cbs [Q (t) + + Yo] 0(0 =An[l+ f {0]Х XCOS {(Oot+fo), где m = M/Ащ - глубина модуляции; АА - девиация a(t)= А, COS ((о„< -f-9о) + + A jn cos №<-bYo)X X cos (COo< -1- (fo) = = An cos {(Oo< -j- ifo) -b + !f-cosl(a> +Q)t + -Ь¥o + Yo] + -2~ X X->s[( o -) + fo -Yo] a (0 = Л„ cos M К -b AoJf (0) -b ¥o = Л, cos где (О = (Оо -bAcof (i); Дсо-девиация; т Дм/Шд-глубина модуляции (О = сОо --Лсй cos (Й< Yo); t 6 = (Ooi -Ь <fo + Д j COS (Q< -I- Yo) di = (Oo< -- До) -f?o+-Q-sin(-bb); Дсо tOo = -Q--индекс модуляции; [a=-q-; Р;=/л|а; a (О = >4ш cos [б)о< -Ь ¥o + P sin (Q< -J-уо)] a (t) = A cos{tOof-f- ? = Уо + Ayf (0. A<prf[f (01 где m = /if0 - глубина модуляции; - девиация 6 = -f Vo -f Ду cos (Q/ -f Yo); a (t)=AniCos K<+Vo + -f A<pcos(Q<-bYo)]; лггноьенкое значение со = (Oj - - Ду2 sin : Л = Д9- девиация частоты; р = Ду - ивдекс модуляции  Амплитудно-частотный спектор модулированного сигнала f(t) - - cos{9<-f Yo) А Ащгп Apj АтГП При p>0, % = Q, Yo = 0 При p- 0 a{t) = Am cos(cOo< -I- cos [(co - Q) < -]- + ¥o + Yo]+cos[(to -bQ) f-b9o-l-Yo] A АщР An, fll £92. a(t) = A, X/ft(B)cosK-fe2)i (,-Яг Clio coo-t-SQ Спектр аналогичен ЧМ, ширина спектра 2ftQ=5:2Aif Вид си шала и счектра Амплитудно-импульсная модуля[1ИЯ >4o=vaT, То, Го. tyj=const Время импульсная модуляция То, l/g = var, Ао, То = const Односторонняя широтно-импульсная модуляция То = var, ij, Ао, То = const Вид модулированного сигнала Вид модулированного сигнала при f (t) = = s\nQt Вид амплитудно-частотного спектра 2 u+r,ifm4it-tko) fe=i fe=i 1 -f msinS-l- Xsin (fe<0o4-a) <  a(t) = A+A, sin-X lt=l n=-co X sin (fecoo -f /zQ) sin (fetoo -f nQ)< Ыо I Zcbo Zu)o-nQ. 82 < 1% при 4<p.<7 и 0,2<m<0,4 a (t) = Ло + Ao sin Q + 00 00 ft=l n=-co Xsin(too-l-fiQ) < - 00 -r- sin k(u t
Q 0)0 20)0 . 82 < 1% при 5sg!A<7 и 0,4<ra<0,8 в приведенных выражениях Лт - амплитуда; соо и фо - частота и фаза модулируемого колебания; t - текущее время; /ь - моменты начала импульсов; длительность импульсов; Го - период следования импульсов. Основные соотношения, характеризующие особенности модуляции гармонических колебаний, представлены в табл. 7.1. При амплитудной модуляции (АМ) мощность модулированного сигнала в течение периода Шо изменяется, ширина частотного спектра АМ-сигнала при модулирующем сигнале f (f) =cos [Q(/)-(-yo] равна 2&шах. АМ-сигнал является периодическим только в случаях, когда Шо и й кратны. Для частотно-модулированного (ЧМ) сигнала средняя мощность примерно постоянна. Ширина частотного спектра при индексе модуляции р=Дш/0>1 равна рО=Дш. При больших р для частотной модуляции необходимо использовать модулируемые колебания довольно высоких частот (при Р=10, Q= =5 кГц, т=0,5, (00=100 кГц). При фазовой модуляции (ФМ) средняя мощность модулированного колебания также примерно постоянна. Ширина частотного спектра ФМ сигнала равна 2ПДф. Отношение мощности сигнала (Яс) к мощности малой флуктуационной помехи (Рп) для ЧМ примерно в 3,3.р2 раза превышает это отношение для, АМ [7.1]. Сигналы АМ, ЧМ и ФМ в ИИС применяются преимущественно в системах параллельного действия. В табл. 7.2 представлены вид модулированных импульсных сигналов и их амплитудно-частотные спектры. АИМ-сигналы повторяют изменение амнли.уды модулирующей величины. Для односторонней ШИМ и времяимнульсных ВИМ-сигналов длительность и частота импульсов пропорциональны значению модулирующей величины. При ВИМ неизбежно происходит одновременная модуляция периода следования Го и моментов th начала импульсов. В этой таблице учитывается, что периодическую последовательность импульсов можно представить рядом Фурье: 00 Г оо 5]ф{<-<й)=Л 7 1-f Jjcfecos;fe(0of где Cft = 2sin (tooTo/2)/(6шоТо/2); Шо=2я/Го. При гармоническом модулирующем сигнале f(t)=Aos\nQt в спектрах АИМ-, ВИМ- и ШИМ-сигналов имеются составляющие, соответствующие частоте Q. Наличие этих составляющих позволяет при демодуляции применить низкочастотные фильтры. Однако для уменьшения влияния высокочастотных составляющих при АИМ необходимо вьтолнение условия Шо>2й, а при ВИМ и односторонней ШИМ соотношение [х=соо/й следует выбирать из условия е<(1/В) п<0 где В амплитуда сигнальной составляющей на выходе демодулятора, (o +ns амплитуда комбинационных составляющих, которые при и<0 попадают в полосу пропускания низкочастотного фильтра [7.2]. в [7.1] показано значительное преимущество в смысле помехоустойчивости ВИМ- и ШИМ-сигналов над АИМ-сигналами, что учитывается при создании телеизмерительных систем (см. гл. 17, 18). Выбор вида модуляции сигналов оказывает существенное влияние на характеристики, а иногда и на состав функциональных блоков ИИС. Спецификой ИИС (по сравнению, например, с системами связи) является возможность выполнения в них процедур измерения и контроля сигналов, модулированных различным способом, и отсутствие необходимости в восстановлении (демодуляции) исходного сигнала с первоначальным видом модуляции. Наибольшее распространение в ИИС ближнего действия в настоящее время имеют АИМ-сигналы. Видимо, это объясняется, во-первых, простотой модуляторов и демодуляторов, во-вторых, легкостью восприятия АИМ-сигналов операторами, в-третьих, высокими по быстродействию характеристиками аппаратуры, работающей с АИМ-сигналами. Следует сказать, что реализации аналоговой части измерительных систем могут быть разнообразными в зависимости от вида модуляции измерительных сигналов. По-видимому, одно из направлений развития ИИС будет связано с рациональным употреблением сигналов с различными видами модуляции. В данной главе далее рассматриваются вопросы унификации и коммутации АИМ-сигналов, а также меры защиты входных цепей с АИМ-сигналами от влияния помех [7.3-7.6]. 7.2. УНИФИЦИРУЮЩИЕ ПРЕОБРАЗОВАТЕЛИ Основное назначение унифицирующих преобразователей связано с приведением аналоговых измерительных сигналов к диапазону стандартных значений, установленных ГОСТ 9895-78 и ГОСТ 26013-81. Применение унифицирующих элементов расширяет возможности использования ИИС, делает их более универсальными. В то же время выполнение некоторых операций унификации сигналов (в частности, масштабирование) связано с введением дополнительных погрешностей в конечный результат измерения и контроля. Наибольшее распространение получили унифицирующие преобразователи АМ-сигналов. В промышленном исполнении выпускаются датчики с унифицированным выходным сигналом, в которых собственно датчики объединяются с унифицирующим преобразователем. Основные функции, выполняемые унифицирующими элементами, сводятся к линейным (установление нуля, температурная компенсация, масштабирование) и нелинейным (линеаризация) преобразованиям сигналов от измерительных цепей с датчиками, а также к уменьшению влияния на них помех. Унифицирующие преобразователи могут быть индивидуальными, связанными с одним датчиком, и групповыми, работающими с несколькими измерительными цепями. Групповые унифицирующие элементы обычно используются в системах, имеющих коммутаторы сигналов измерительных цепей. При применении групповых унифицирующих элементов особенно важно, чтобы выполнялись условия правильного согласования их точностных и динамических характеристик с характеристиками коммутатора и других элементов измерительного тракта. Типичная задача, решаемая при линейных преобразованиях сигналов, выполняемых унифицирующими элементами, заключается в следующем. Пусть система рассчитана на работу с унифицированным сигналом, имеющим дина- мический диапазон [О, Хе] (рис. 7.1), а сигнал от датчика изменяется от Хтгп до Хшах, при этом~Хи>Хта!-х,п1п- В нсрвом взрианте ДЛЯ совмещения начала динамических диапазонов ИИС и датчика к сигналу датчика должен быть добавлен сигнал Хтгп, а затем полученный суммарный сигнал должен быть усилен в А=хи/{хшах-хтгп) рзз (см. рис. 3.2,6). СЛСА первого варианта, с учетом того что Хшгп может быть разного знака, будет иметь вид 1[{х.тах,. Х„,1п)/{Хшах±Хшгп, 0)]l[{Xmax±Xmin)A]. ВоЗМОжен ВЗрИаНТ (рИС. 7Л,в), нрИ котором сигнал от датчика сначала усиливается, а затем совмещаются начала шкал. В этом случае унифицирующий элемент должен выполнить преобразования, удовлетворяющие условиям А=Хв/(Хтах-Хшгп), Wd=-Xmin[XH / (Х,пах-Хтгп)]- СЛСА второго варианта преобразователя имеет вид l[iX,riax±Xmin)A=Xa\l[iAx ,ax±Ax ,i )/(AXr,iax±Axin), 0]. Для второго варианта, при котором сначала производится масштабирование (положим, усиление сигнала), а затем совмещение начала шкал, нужно отметить следующее. Если смещение динамических диапазонов {Axmax±Axmin) и [О, Хв] значительно, то, для того чтобы система могла воспринять такой смещенный сигнал, динамический диапазон ее входных устройств должен значительно превышать динамический диапазон сигнала от измерительной цепи. Так, например, нулевой сигнал тензодатчиков, обусловленный начальной разностью сопротивлррия, может в несколько раз превышать динамический диапазон полезного сигнала, вызываемого изменением измеряемой деформации поверхности. Первый вариант приведения сигнала датчиков к унифицированному уровню преимущественно используется в индивидуальных уницифирующих элементах, второй - в групповых. Случай Xm.in¥=0 на практике встречается весьма часто. Объясняется он наличием термо-ЭДС холодного спая термопар, начального сопротивления термометров сопротивления, проволочных тензодатчиков и соединительных линий между тензодатчиками и термометрами сопротивления и их измерительными схемами. Для компенсации температуры холодного спая при применении термопар используется неуравновешенный мост с термозависимым сопротивлением плеча и с омическим делителем напряжения (рис. 7.2), позволяющий получать смещающие напряжения Xmin для различных типов термопар [хромель - копель (X -К), хромель - алюмель (X -А), платинородий - платина (П -П)], учитывающие температуру окружающей среды. Для тензодатчиков и термометров сопротивления в унифицирующих элементах используется мост, уравновешиваемый перед экспериментом с помощью балансировочного узла БУ (рис. 7.3). Для уменьшения влияния соединительных линий и внешних наводок на них может использоваться трехнроводная линия соединения термометров сопротивления Ric с остальной измерительной схемой. Для дифференциально-трансформаторных датчиков начальное напряжение устраняется зачастую с помощью балансировочного узла БУ, включенного в дифференциальную схему (рис. 7.4). Следует заметить, что при большом чисае величин, воспринимаемых параметрическими датчиками, наличие балансировочных узлов, с помощью которых перед началом эксперимента устраняется расхождение динамических диапазонов сигналов от измерительных схем с датчиками, часто создает значительные неудобства, так как ручные операции баланси- О Рис. 7.1. К линейному преобразованию сигналов датчиков: а - динамические диапазоны шкалы и измеряемой ве ичины; б - совмещение минимального значения измеряемой величины с нулевой отметкой шкалы; в - приведение масштаба динамического диапазона измеряемой величины к масштабу шкалы с последующим совмещением с нулевой отметкой шкалы -р и г, о- Rn Rn х-к .Х-А п-п Рис. 7.2. Схема компенсации температуры холодного спая термопар: - термозависимое сопротивление; R- постоянное сопротивление La- i Рис. 7.3. Схема включения термометров сопротивления ровки занимают значительное время и, кроме того, трудно обеспечить высокие требования к стабильности балансировочных узлов в течение длительного времени. Для устранения этих недостатков применяются специальные групповые унифицирующие устройства. Функциональная схема одного из таких устройств приведена на рис. 7.5. Это устройство предназначено для применения с параметрическими датчиками, сигналы которых зависят от внешнего воздействия Р на объект исследования и от начальных, отличных от нуля сигналов измерительных цепей Хо: Х= = ф(Р, Х'в). Нужно отметить, что ключи Ki, К2 и Кз могут находиться в замкнутом- фк (1) или разомкнутом - фк (0) состоянии. При отсутствии внешних воздействий на объект исследования (Ро=0) сигналы от измерительных цепей с датчиками Хс будут определяться только начальными сигналами измерительных цепей. СЛСА этого начального этапа работы устройства будет иметь ви.а, Ф(В) Ф[Ро=0; фк1(1); ФК2(0); фкз(О)] [ Ф(t:=t-fl) 1(Х„/Хог)Х +1 {хт/гы) I (5 : Zot, Di)со{i=n) Затем производится измерение вели-шны при внешнем воздействии на объект Pi: Ф(В)Ф [Р,; <р,,(0); ,{ 1); 9,,(1)] L Ф (i: = {[I iJx,)] [I {R : г„;)Х X I (Z i/X ;)]} I -X i) I [(Xii -X i)/Z;,.] I (zj,.) CO (t = n) П Ф (E)... Ha выходе устройства коррекции после этого этапа формируются значения Zi*, в которых отсутствуют начальные сигналы. С одной стороны, использование такого унифицирующего устройства существенно облегчает требования к АЦП 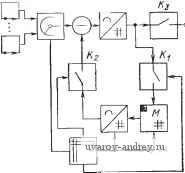 Рис. 7.4. Схема включения дифференциально-трансформаторного датчика Рис. 7.5. Схема коррекции ненулевых начальных сигналов датчиков и последующим блокам системы, автоматизирует операции совмещения начала шкал сигналов от измерительных цепей с датчиками. Но, с другой стороны, цифро-аналоговое преобразование требует дополнительной затраты времени. Исключение влияния начальных сигналов от измерительных цепей с датчиками может быть реализовано на уровне кодоимпульсных сигналов. Тогда при измерениях отпадает необходимость в цифро-аналоговом преобразовании: Ф (В) Ф (Я = Pi) L Ф (t : = t 4-1) I (Al/JCii) [I (xii/zii) II I (R : Zo;)] I [(Zi; -- ZoJ = zI;] I (S : 2;., D) CO (i = n) П Ф (E). Здесь операторы Ф(К: Zoi) и I(R:Zoi) означают команду выбрать из памяти результат измерения начального показания t-ro датчика и реализацию выборки соответственно. Усиление сигналов от измерительных цепей с датчиками выполняется в большинстве случаев с помощью усилителей постоянного тока (обычно с промежуточной АИМ, усилением на переменном токе и демодуляцией) и переменного тока. При применении параметрических датчиков имеется возможность выполнять масштабирование сигналов на выходе измерительных схем с такими датчиками, изменяя напряжение их питания. Существенно поднять уровень сигнала от измерительной схемы с датчиками удается при применении импульсного питания. К сожалению, этот путь имеет ограничения. Сверху ограничения накладываются обычно предельно допустимыми тепловыми режимами, а снизу - уровнями шумов. При импульсном питании необходимо подбирать такую форму и длительность импульсов, чтобы за время действия импульса переходные процессы были закончены и выполнены необходимые преобразования сигнала, а переходные тепловые процессы в элементах измерительной цепи оказывали на эти преобразования незначительное влияние. Линеаризация сигналов от датчиков необходима, если шкала входного измерительного преобразователя системы линейна, а сигнал от датчика связан со значениями контролируемого параметра нелинейной зависимостью х=Ц&). Тогда после линейного преобразования сигналов, в результате которого динамические диапазоны сигнала датчиков и шкалы системы совпадают, необходимо выполнить операцию линеаризации. На практике это осуществляется либо введением поправок на нелинейность сигналов, либо с помощью линеаризующих устройств в уни- г > Выход Рис. 7.6. Электрическая схема ли-неаризатора сигнала неуравновешенного моста фицирующих элементах, в функцио нальных АЦП или в вычислительных устройства системы. Обычным приемом, используемым в унифицирующих элементах, является линеаризация сигналов от датчиков с помощью функциональных преобразователей (диодных цепочек, секционированных реохородов и т. п.), аппроксимирующих зависимость /(0) несколькими отрезками прямых линий. При этом линеаризатор должен иметь характеристику, позволяющую привести /(0) к линейной зависимости. Линеаризация может производиться с помощью усилителей с нелинейной обратной связью, в цепь которой входит резистивный делитель с шунтирующими диодами. Интересен способ уменьшения нелинейности выходного сигнала неуравновешенных мостов, вызываемой переменным суммарным сопротивлением мостовой цепи и нелинейностью отношения плеч при одном датчике, воспринимающем контролируемую величину. Этот способ основан на изменении напряжения питания моста с помощью усилителя с переменной обратной связью (рис. 7.6), благодаря чему на плече 2R~\-Rn поддерживается постоянное напряжение; при нелинейности датчика около 1 % нелинейность выходного напряжения не превышает приблизительно 0,1 %. Выбор типа линеаризаторов - аппаратный (индивидуальный или групповой) либо поограммный (с использованием цифровых вычислительных устройств) - завис , от количества и вида исследуемых величин, требований к точности преобразования и другим характеристикам. Нужно отметить что унифицирующие элементы выполняют зачастую ряд дополнительных функций; к ним, например, относятся уменьшение влияния вышедшего из строя датчика на последующие узлы системы, согласование сопротивления датчика со входом системы (в большинстве случаев выходное сопротивление унифицирующих элементов должно находиться в пределах от 100 до 300 Ом) и др. 7.3. ИЗМЕРИТЕЛЬНЫЕ КОММУТАТОРЫ АМПЛИТУДНО-МОДУЛИРОВАННЫХ СИГНАЛОВ Основные типы коммутаторов и их характеристики Основное назначение коммутаторов - образование между блоками соеди-ний, обеспечивающих прохождение сигналов в заданных направлениях. Если говорить о коммутаторах предназначенных для работы в измерительной части ИИС, то их основное назначение - связывать между собой участки аналоговых измерительных цепей, работающие в парачлельиом и последовательном режимах. Особенное значение для ИИС представляют измерительные коммутаторы, служащие для переключения аналоговых измерительных сигналов, так как к ни.м предъявляются требования выполнения коммутационных операций с заданными метрологическими характеристиками. Измерительные коммутаторы АМ-сигиалов характеризуются следующими параметрами: динамическим диапазоном коммутируемых величин; погрешностью коэффициента передачи аналогового сигнала 6= (Л вX-4в ы х)/-4 вX, где Авх и у4 в ых-соответственно входной и выходной сигналы коммутатора; быстродействием или скоростью коммутации; для коммутаторов эти последние параметры оцениваются количеством переключений в секунду (коммутаторы циклического действия) или временем, необходимым для выполнения одной коммутационной операции; числом коммутируемых сигналов - входов п, числом выходов h и числом одновременно образуемых каналов k; в большинстве случаев n>hu kh, наибольшее распространение имеют измерительные коммутаторы с h=k=\; количеством коммутирующих измерительных N и управляющих М элементов коммутатора; обычно при проектировании коммутаторов стремятся к уменьшению N л М\ сроком службы, исчисляемым предельным количеством операций переключения, при котором основные характеристики коммутаторов остаются неизменными в заданных пределах. Коммутаторы различаются также последовательностью (программой) переключения входных сигналов. В коммутаторах могут быть реализованы циклический и адресный режимы. При циклическом режиме коммутация производится по заранее установленной программе с заданной коммутационной функцией, определяющей последовательность соединения входов с выходами коммутатора. При адресной работе коммутатора последовательность переключения заранее, как правило, не определяется. Например, при адаптивной коммутации (см. ч. 3) адрес определяется в результате анализа состояния коммутируемых величин. В зависимости от типа используемых в коммутаторе коммутационных элементов различаются контактные и бесконтактные коммутаторы. Коммутационные элементы Любой коммутационный элемент состоит из ключа и управляющего элемента. Под ключом понимается двухполюсный элемент электрической цепи, который может находиться в замкнутом состоянии, когда проводимость ключа велика, или разомкнутом, когда проводимость мала. В качестве ключей используются элементы, обладающие явно выраженными нелинейными вольт-амперными характеристиками. Переход ключа из одного состояния в другое выполняется с помощью управляющего элемента. Наиболее важными расчетными характеристиками ключей для электрических сигналов являются: сопротивление или проводимость в замкнутом и разомкнутом состояниях (гз или i3, гр или Ур); широко используется также отношение Гр/гз, которое носит название коммутационного коэффициента; собственные (паразитные) ЭДС и ток ключа е^ и to, возникающие в коммутируемой цепи под действием управляющих сигналов, собственных шумов, паразитных наводок, контактных разностей потенциалов и пр.; динамический, диапазон, равный отношению максимальной и минимальной амплитуд входного сигнала: £д=Лшах 4тш; 1 ... 7 8 9 10 11 12 13 ... 44 источник |
|
© 2000-2026. Поддержка сайта: +7 495 7950139 добавочный 133270.
Заимствование текстов разрешено при условии цитирования. |